
On revient sur la dernière stack d’entrée de gamme de chez SpeedyBee : la F405 V4 BLS 55A, pour un retour d’expérience détaillé. C’est aussi l’occasion de voir ce que vaut l’ICM42688p, l’un des gyros les plus récents équipant les nouveaux contrôleurs de vol. On abordera aussi les subtilités de la configuration de Betaflight qui en découlent.
La vidéo
Retrouvez notre review complète en vidéo :

Présentation et contenu
Pour rappel, un article sur le blog vous présentait déjà cette stack et ses principales caractéristiques. Gardons également en tête son prix très agressif de 79€ en shop FR (DFR et LaCaméraEmbarquée) et 65€ sur le site de SpeedyBee. Dans cette review, on ne relistera pas à nouveaux toutes les spécifications. On se concentrera sur les points importants et n’apparaissant pas forcément sur la fiche produit.
Cette stack est au format 30×30, si vous cherchez une stack au format 20×20, elle existe, et Qnnk en a fait la review.


Concernant le contenu de la boîte :
- Pas de manuel papier, mais un QR code pour télécharger une documentation complète et qualitative
- Pigtail XT60 en 12AWG, que je n’ai pas utilisé, je préfère du 14AWG, c’est plus léger, plus pratique et suffisant
- 4 vis de stack de 30mm, des écrous, des o-ring et des softmounts pour la FC et les ESCs. Avec les softmounts fournis, la stack est assez haute, j’ai remplacé ceux des ESCs par des moins hauts.
- Un condo de 1000µF 35V d’une marque peu connue (Chengxing)
- Une nappe pour Air Unit et 2 nappes pour relier la FC aux ESCs (une courte et une longue permettant de modifier l’orientation de la FC indépendamment de celle des ESCs).
Les ESCs BLS 55A
Voici ce qu’il faut retenir concernant ces ESCs :
- Firmware : BLHeliS par défaut, flashable avec Bluejay ou JESC pour profiter du DShot Bidirectionnel. J’ai eu de très bons résultats avec Bluejay
- Il supporte des courants de 55A et jusqu’à 70A pendant 10s, c’est impressionnant pour cette gamme de prix
- Ils disposent d’une diode de protection TVS faisant office de spike absorber
- Ils embarquent un dissipateur thermique, assez épais mais qui a le mérite de ne pas être trop encombrant, il dépasse à peine des gummies silicone
- Le connecteur qui part vers la FC est doublé par des pads de soudure. C’est un point important : soit pour fiabiliser un build en évitant le débranchement de la nappe, soit en cas d’arrachage du connecteur, ça permet de continuer de pouvoir utiliser les ESCs
La carte de vol SpeedyBee F405 V4
La FC n’est pas non plus avare en points forts :
- Connecteur USB-C
- Microcontrôleur (MCU) : F405, de l’entrée de gamme
- Gyro : ICM42688p, assez récent, tournant à 8Khz, à l’instar des MPU6000
- Elle support jusqu’à 8 moteurs
- Dispose d’un baromètre
- Le Bluetooth est de la partie et permet de configurer la stack, sans fil, grâce à l’application SpeedyBee, depuis sont portable ou sa tablette
- La partie alimentation de la carte a été très soignée et ça mérite d’être souligné :
- la FC dispose également d’une diode de protection TVS
- L’alimentation du gyro dispose d’une protection contre les surtensions et est filtrée par un condensateur dédié de 100µF
- Des LEDs donnent un aperçu du niveau de charge de la lipo
- Un BEC 5V et un autre 9V de 3A chacun
- Et cerise sur le gâteau : on dispose de 2 pads 4.5V pour alimenter le RX et le GPS : ces pads sont alimentés quand la FC est branchée en USB. Très pratique pour les tests sur le bench mais aussi pour fixer le GPS avant de décoller sans avoir besoin de brancher de lipo et de faire chauffer votre VTX.
- Pour la Blackbox, SpeedyBee a fait le choix d’un lecteur de carte SD plutôt que d’avoir une puce mémoire embarquée. Attention, il faudra utiliser des SD de 32Go maximum mais seuls 4Go seront utilisables.
- On dispose de connecteurs de LED aux 4 coins de la FC
- Les pads sont très bien labellisés, y compris le gyro ICM42688p ! Souvent on fait la chasse au gyro pour être sûr qu’aucunfil ne vienne le taquiner, là il est clairement indiqué
- La FC dispose évidemment d’une puce OSD pour ceux qui volent en analogique
- Attention, une petite remarque en passant : dans l’orientation « par défaut » si la pigtail est soudée verticalement, elle bouche l’accès au connecteur DJI
Le gyro ICM42688
Comme vous pouvez le voir dans la vidéo de la review, le comportement en vol est très bon. A noter qu’aucun tune spécifique n’a été appliqué pour ce gyro. Nous nous sommes contentés d’appliquer le preset du JeNo, qui a déjà fait ses preuves avec des MPU6000 et des BMI270.
Un rapide coup d’œil à la blackbox nous confirme le ressenti en vol :
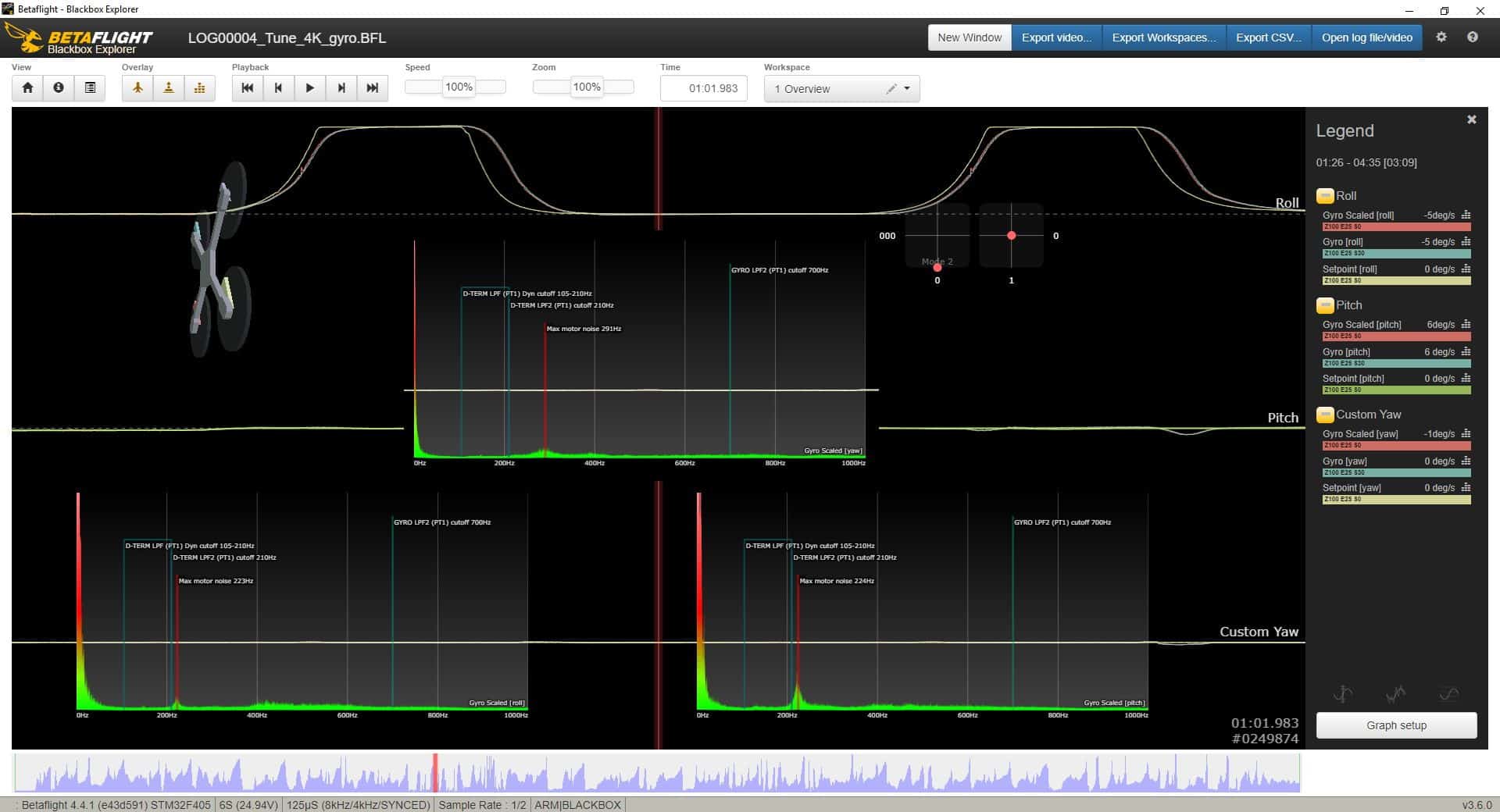
Pour être sûr d’avoir de bons résultats avec un ICM42688p, assurez-vous d’être sur une version récente de Betaflight. En l’occurrence la 4.4.1 au minimum qui contient les dernières optimisations pour ce gyro.
Vitesse de la boucle PID
Avec une F405, lorsque le DShot bidirectionnel est activé, faut-il absolument tourner à 4Khz ou peut-on pousser à 8Khz ?
Car oui, c’est dommage d’avoir un ICM42688p qui tourne à 8Khz mais de devoir limiter la boucle PIDs à 4Khz à cause d’un MCU F405.
Officiellement, les notes de tuning Betaflight recommandent de ne pas dépasser les 75% d’utilisation CPU sur le bench. Alors que d’autres sources indiquent que prévoir une marge de 10-15% est suffisant.
Ce sujet est très intéressant et une grande partie de la vidéo lui est consacrée. Malheureusement, cet article est déjà assez long comme ça, et on ira droit au but :
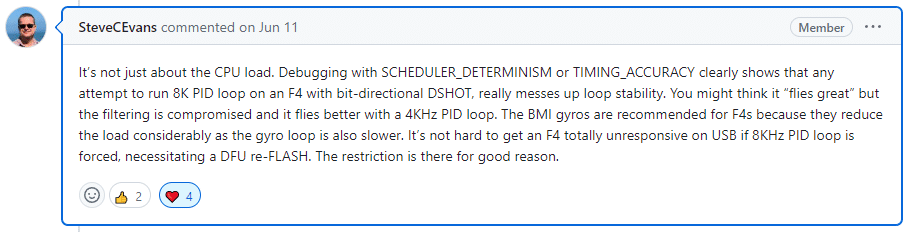
Ce n’est pas seulement une question de charge CPU. Une analyse détaillée révèle que tourner avec une boucle PID à 8Khz sur une F4, avec le DShot bidirectionnel d’activé compromet la stabilité de la boucle. Et même si on a l’impression que ça vole très bien, le filtrage est en réalité altéré et le quad vole finalement mieux avec une boucle PID à 4khz.
A partir de Betaflight 4.4.2, avec une F4 et un gyro à 8Khz, lorsqu’on active le DShot Bidirectionnel, la boucle PID passe à 4Khz et le protocole des ESCs en DShot300, c’est normal.
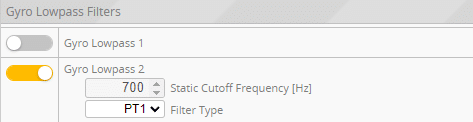
Enfin, dans une situation de « downscaling » du signal gyro, c’est à dire lors de l’utilisation d’un gyro tournant à 8Khz et avec une boucle PID à 4Khz, il est fortement recommandé de conserver au minimum un filtre gyro LPF d’activé (le second).
Conclusion
3 choses à retenir de cette review :
- Le gyro ICM42688p est un bon gyro, parfaitement géré par Betaflight, qui ne bride pas la boucle PIDs comme un BMI270. Même si je pense que c’est un faux problème. A titre d’exemple, les FC KISS tournent à 1 ou 2Khz et bcp de pilotes en sont très contents. Il ne faut pas trop se formaliser sur la vitesse de la boucle PID.
- Avec une F405 et le DShot Bidirectionnel d’activé, il faut utiliser une boucle PID à 4Khz avec du DShot300. Mais la question ne se pose plus depuis la dernière version de Betaflight, vous n’avez plus le choix.
- Enfin, cette nouvelle FC d’entrée de gamme de chez SpeedyBee est une très bonne option !
Elle est à la fois riche en fonctionnalités, de qualité et la partie alimentation a été très soignée pour protéger au mieux les différents composants qu’elle embarque. De plus l’implémentation de l’ICM42688p semble impeccable, aucun bruit ne vient le perturber.
Vous l’aurez compris, je n’ai pas grand-chose à lui reprocher. Si ce n’est la hauteur des gummies ou l’utilisation d’un lecteur SD pour la BB… Le fait de devoir configurer la boucle PID à 4Khz pourrait être vu comme un défaut quand on sait qu’elle est équipée d’un gyro qui tourne à 8Khz. Mais je pense que personne ne serait capable de faire la différence entre une boucle PID à 4Khz et un boucle à 8Khz lors d’un test en aveugle.
Je n’ai pas mieux à vous proposer en défauts : cette stack je l’ai montée, et ça a volé parfaitement dès la première lipo. Donc je ne peux que la recommander !