Après de nombreuses années et de nombreux fails, j’ai enfin pu me mettre à l’avion FPV (mais aussi l’aile volante et plus généralement la voilure fixe) grâce à l’AtomRC Penguin. Il s’agit d’un modèle disponible en kit, « semi » kit et version prête à voler. C’est cette dernière que je vais vous présenter dans ce test qui s’apparente à un feedback d’un point de vue débutant.
Acheter l'AtomRC Penguin avec -5% grâce au code WaF 💰- 1 La review en vidéo
- 2 Les points forts du Penguin
- 3 Caractéristiques techniques
- 4 Unboxing (déballage) du Penguin
- 5 Montage du DJI O3 dans l’AtomRC Penguin
- 6 Réglages iNav du Penguin
- 7 Maiden
- 8 Des améliorations ?
- 9 Conclusion
- 10 Les chaînes à suivre ▶️
- 11 Acheter l’AtomRC Penguin 🛒
- 12 D’autres photos de l’AtomRC Penguin 📷
La review en vidéo

Les points forts du Penguin
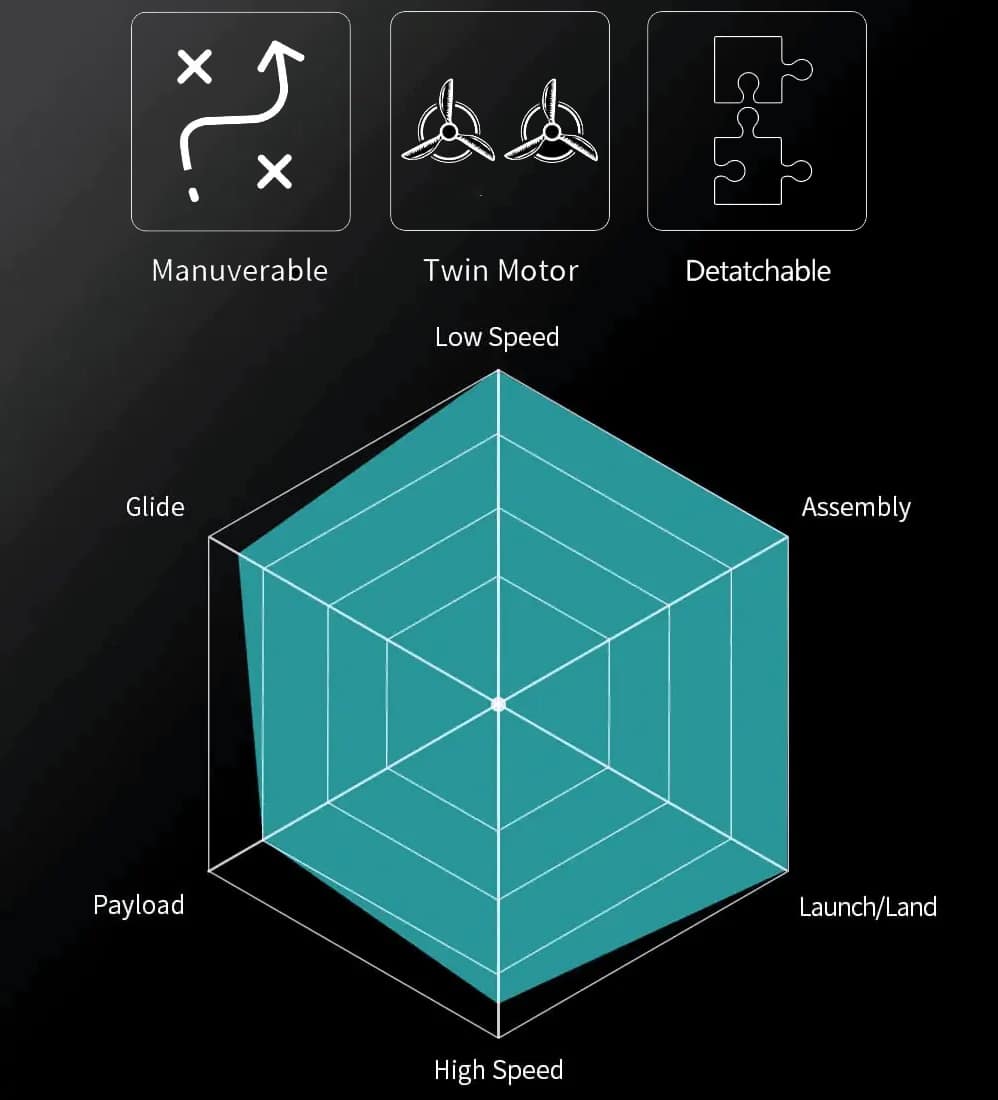
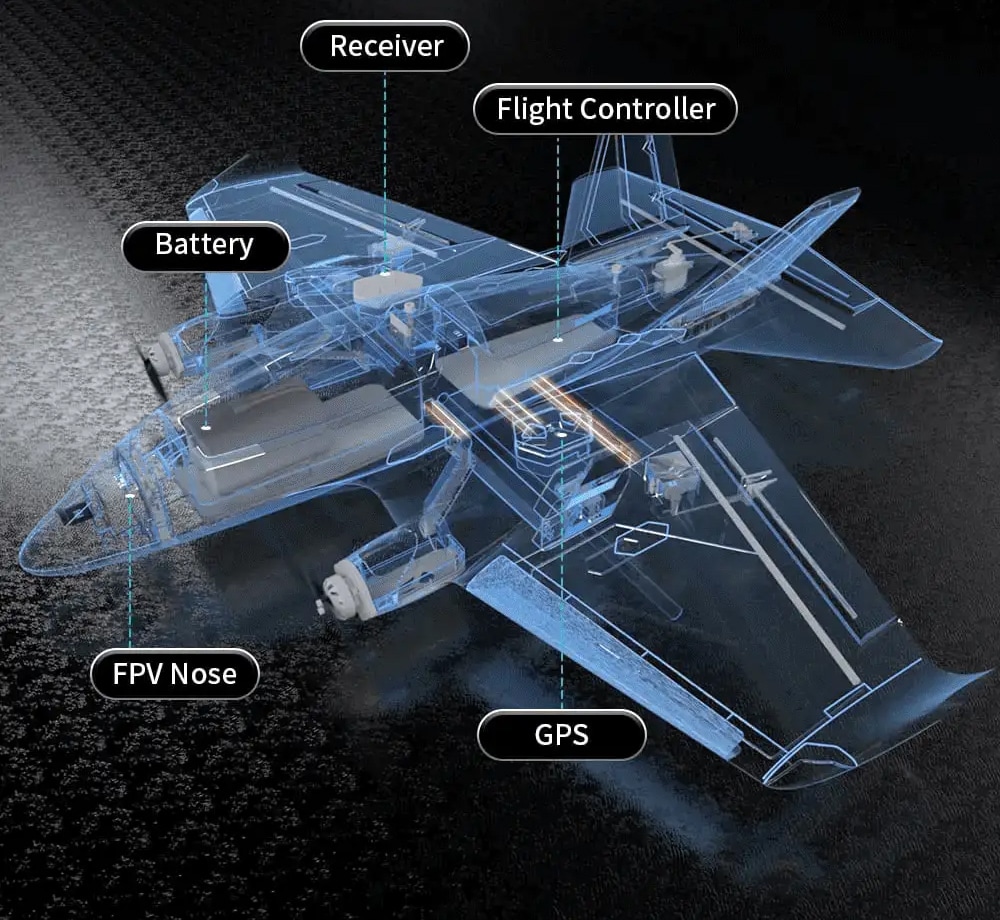
Avec une envergure de 750mm et de larges ailes (amovibles), ce penguin bi-moteurs offre 15.06dm² de portance en EPP. Ainsi, il peut voler très lentement, ce qui est très rassurant pour les novice comme moi qui ont peur du décrochage et de l’atterrissage ! Ses ailes détachables facilitent le transport (mais pas autant que l’Heewing T1 Ranger) et limitent la casse en cas de crash ou d’atterrissage un peu violent. Des LED situées sous le fuselage permettent aussi bien de le repérer en vol à vue que de le suivre plus facilement en chasing (avec drone FPV ou aile volante).
Caractéristiques techniques
L’électronique
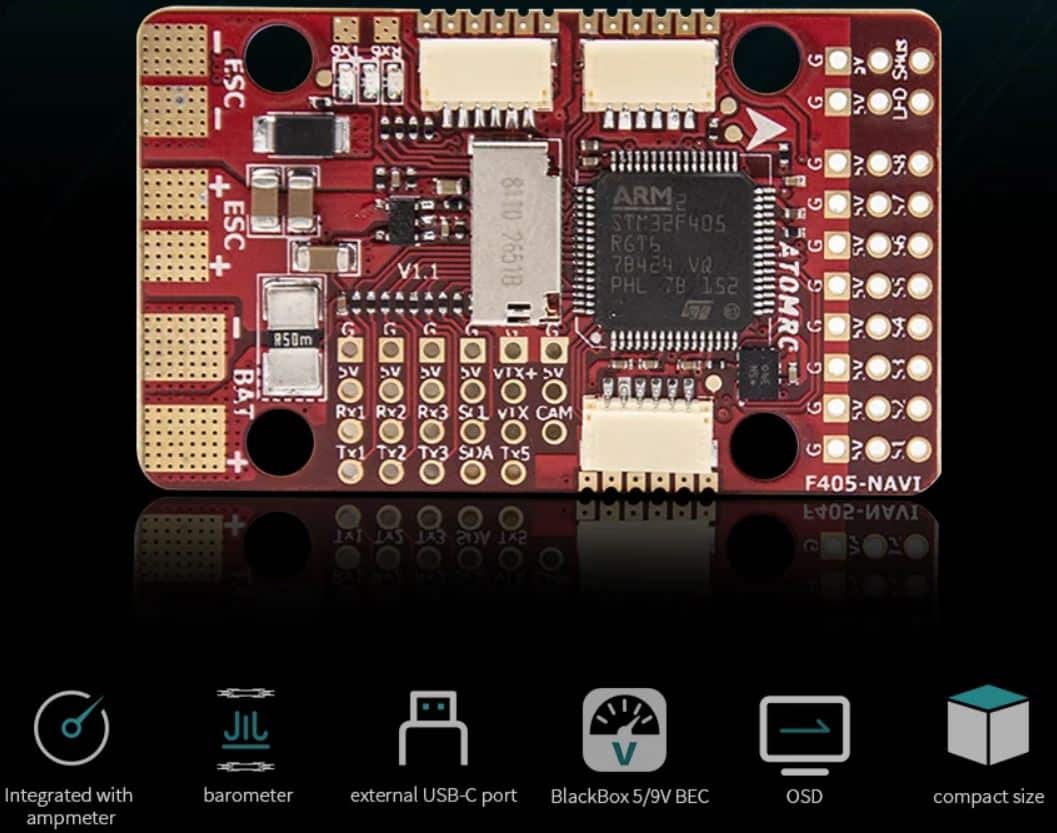
Au cœur du Penguin, dissimulé sous une trappe en EPP vissée, on retrouve un contrôleur de vol pour voilure fixe du constructeur, l’AtomRC F405 Navi. Propulsé par un processeur de type F4 à 168MHz et compatible 6S, il embarque un gyroscope BMI270, un baromètre SPL06-001, un OSD AT7456E, un lecteur de carte micro-SD pour faire de la BlackBox, un capteur de tension, un autre pour le courant, 5 UARTs et 8 sorties PWM.
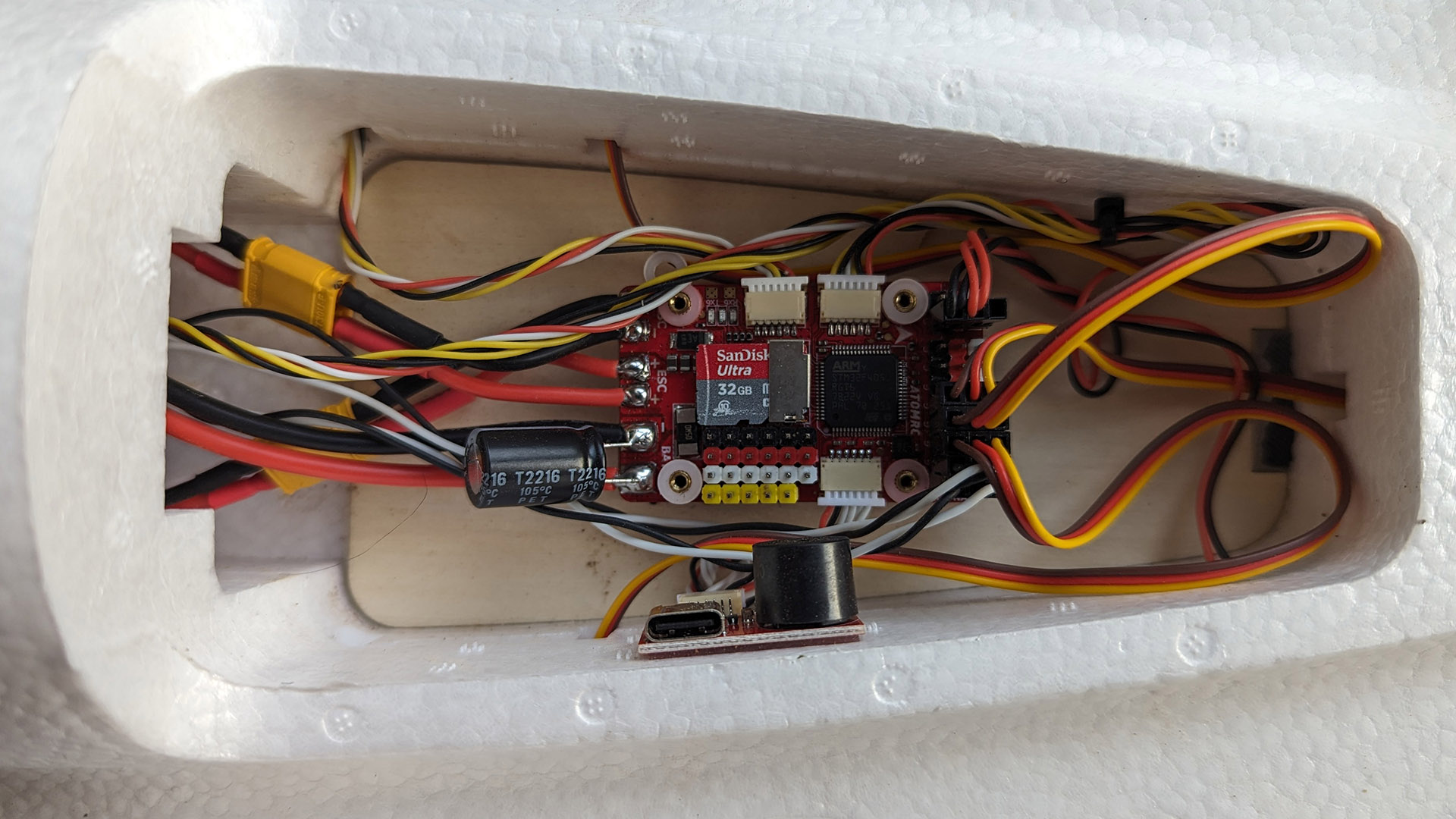
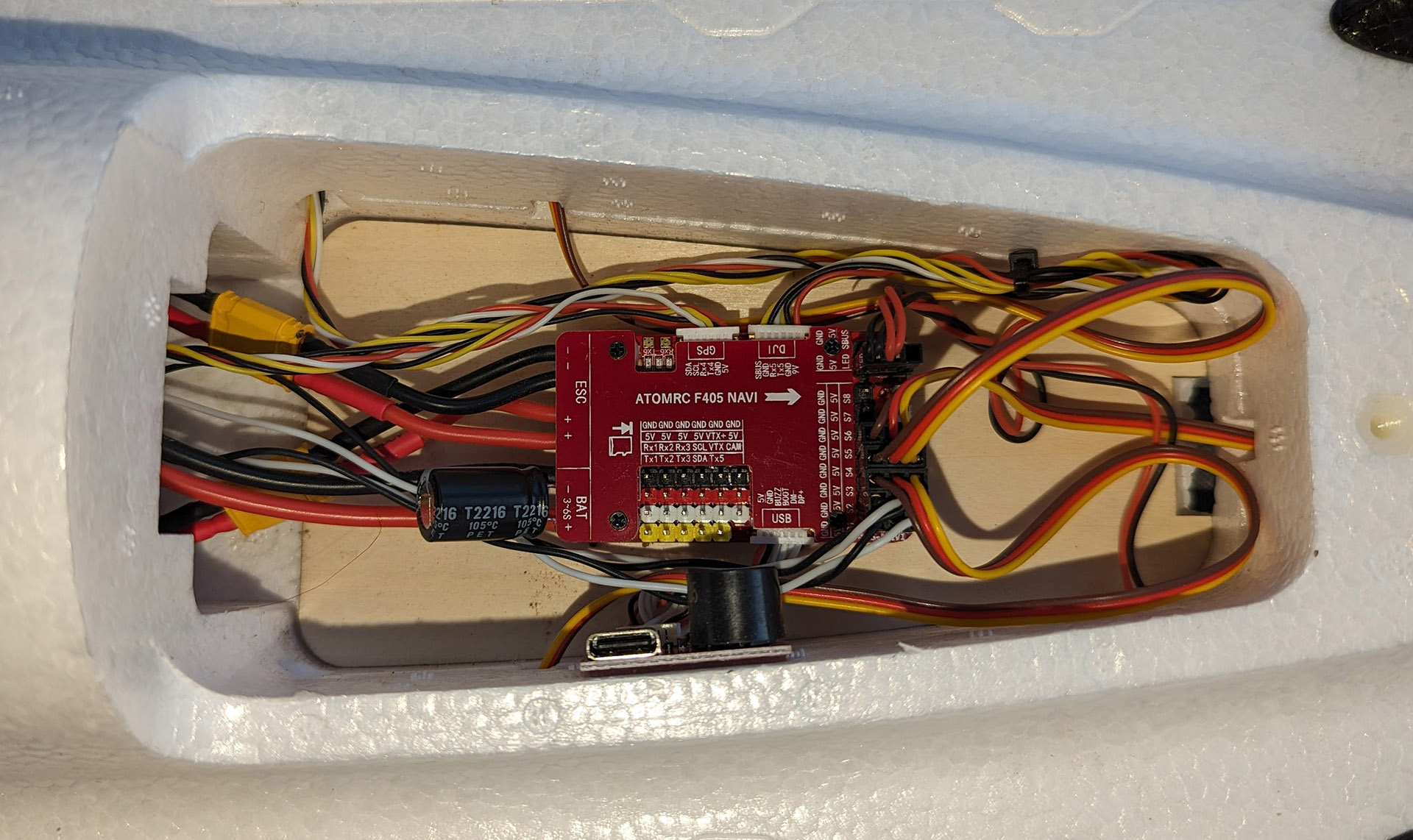
Pour faciliter les réglages iNav, le port USB Type-C est déporté sur une carte sur laquelle on retrouve également un buzzer désactivable avec un interrupteur situé juste dessous. Cerise sur le gateau, une plaque de protection vient protéger tous les composant et éviter l’éjection de la carte SD.
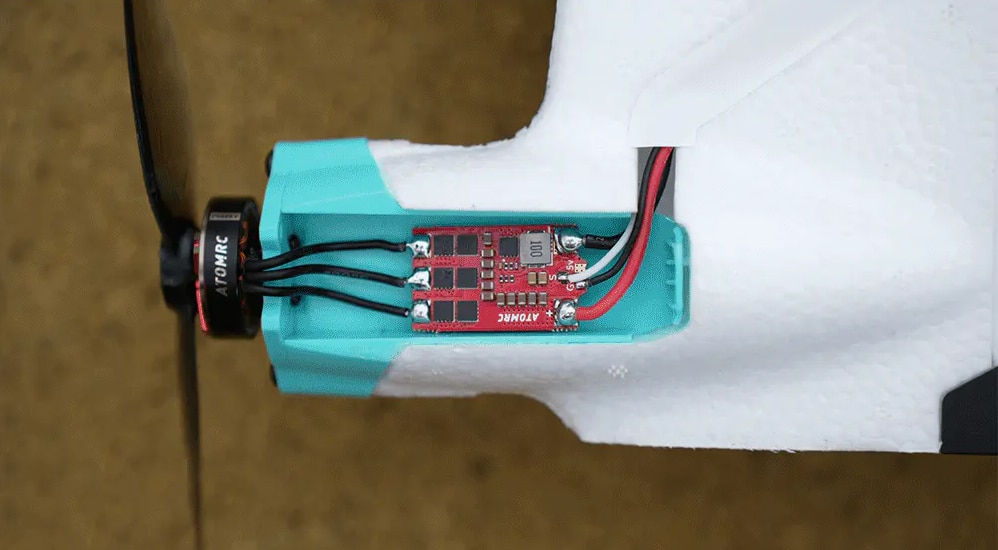
Pour contrôler les moteurs, 2 ESCs alimentés par une prise XT30 sont installés au plus près des moteurs qui sont soudés dessus. Compatibles 4S et pouvant encaisser 30A en continu, ils sont fabriqués par le constructeur et tournent sous le firmware BLHeli_S.
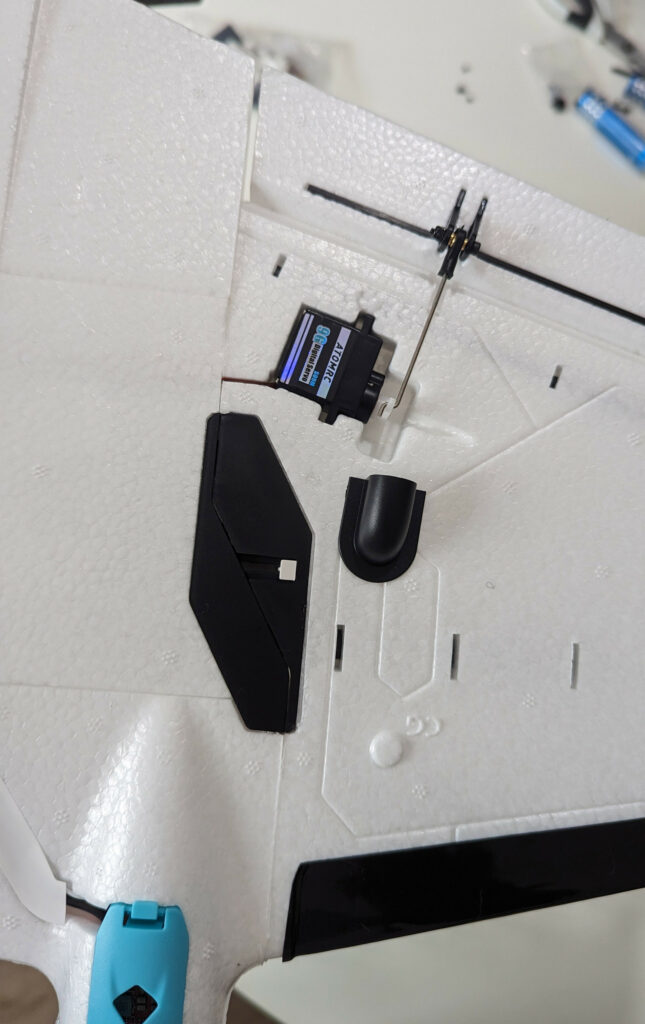
Les 3 ailerons sont actionnés par des servo S09M de 9 grammes avec des engrenages en métal.
Moteurs et hélices

La traction du Penguin est assurée par 2 moteurs 2204 à 2400KV de la marque AtomRC. Ces derniers sont chaussés d’hélices Gemfan 6026. Si ce combo permet à l’avion de très bien voler, avec grip et réactivité, il n’est clairement pas efficient et a tendance à drainer les batteries.
LiPo / LiIon, poids et centre de gravité
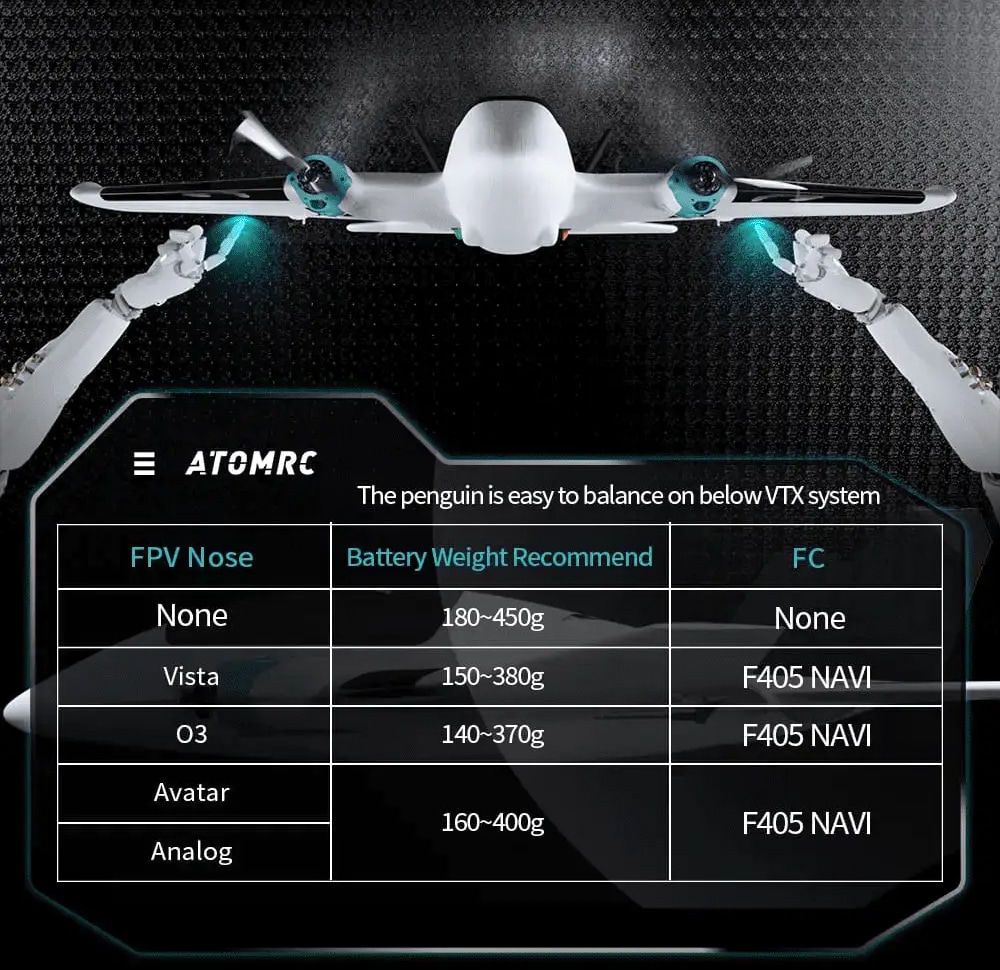
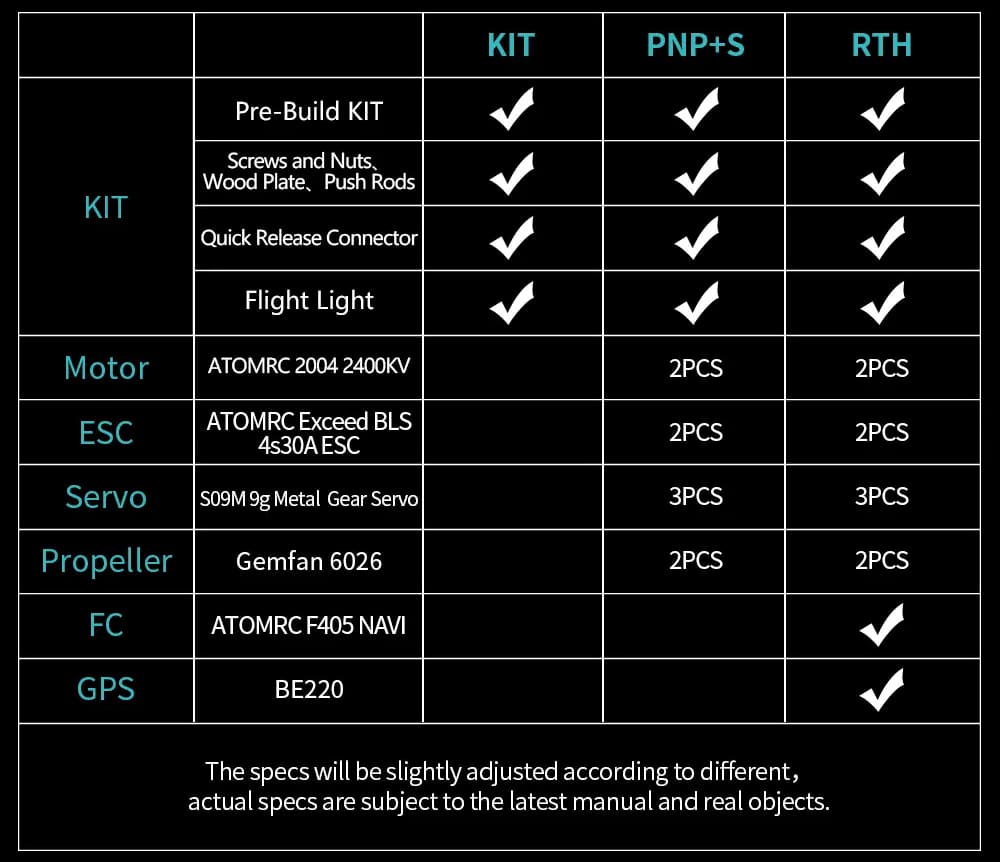
AtomRC recommande un poids en ordre de vol aux alentours de 1200 grammes. Le tableau ci-dessus indique le poids de batterie conseillé en fonction du système FPV. Si vous voulez pouvoir voler très lentement (moins de 20km/h), il ne faut clairement pas taper dans le haut de la fourchette. A titre indicatif, j’utilise des LiPos 4S Ovonic 2200mAh 35C qui font moins de 180g. En contrepartie, l’autonomie est réduite (autour des 6 minutes). Pour voler plus longtemps, mieux vaut utiliser une Li-Ion.
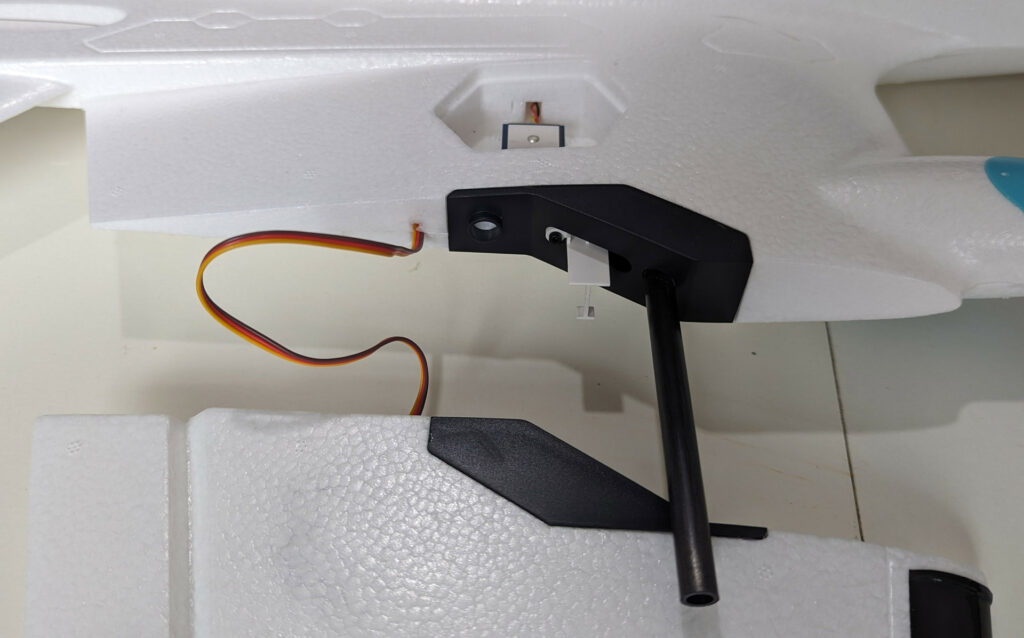
La batterie s’installé à l’avant du fuselage, sous un capot lui aussi vissé. Le support de strap dispose d’une graduation qui permet d’ajuster facilement le centre de gravité grâce aux repères pour les doigts présents sur chacune des ailes.
Acheter l'AtomRC Penguin avec -5% grâce au code WaF 💰La partie FPV

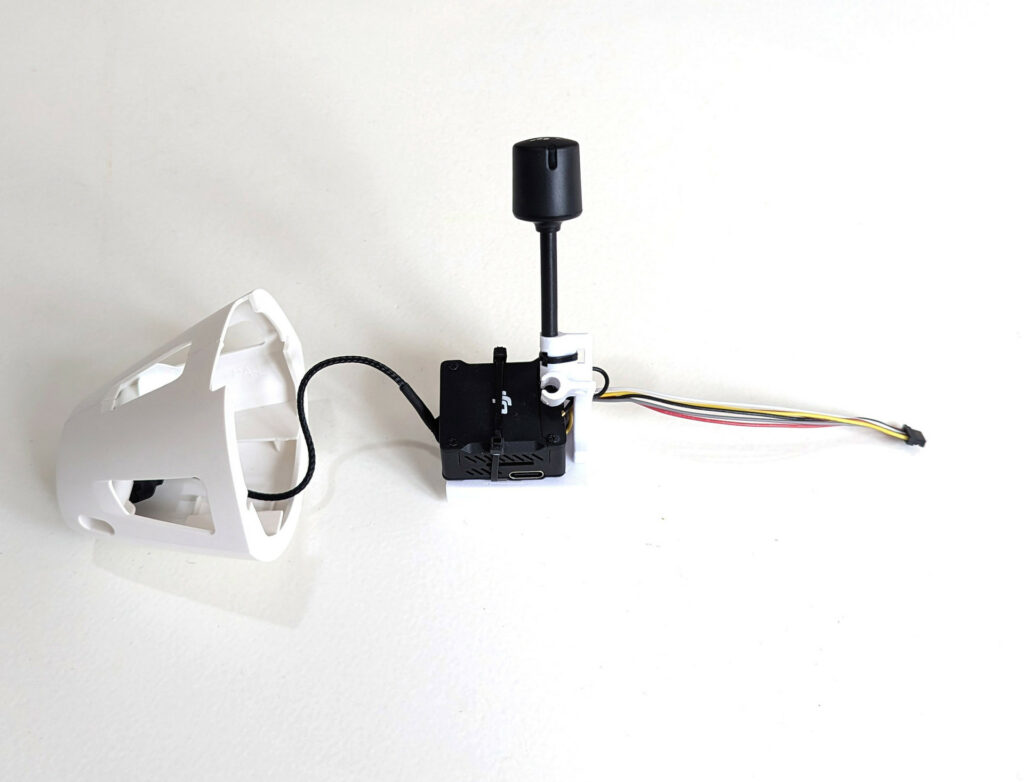
Le nez FPV du pingouin est en plastique moulé et protège parfaitement la caméra sans apparaitre dans le champ de vision (en DJI O3 tout du moins). Il est fixé au fuselage par 2 vis pour éviter tout arrachage. Il est compatible Walksnail Avatar, DJI O3 et Caddx Vista.
Un nez en EPP et aimanté cette fois-ci est aussi fourni pour les pilotes qui volent à vue.
Unboxing (déballage) du Penguin
Montage du DJI O3 dans l’AtomRC Penguin


Le montage du Penguin est extrêmement simple. Les 2 ailes se clipsent (et se déclipsent en appuyant sur la languette, pas en tirant…). Les servos se branchent sur la FC en suivant le petit fascicule fourni dans la boite. Le DJI O3 est plug & play sans soudure grâce au long câble fourni. Les hélices doivent évidemment être installées dans le bon sens.
Une fois l’animal assemblé et monté, il y a juste les réglages de base à faire sous iNav, à savoir paramétrer le récepteur radio (DJI RC V2 pour ma part), les modes et éventuellement l’OSD HD.
Afin d’éviter les problèmes de broutage moteur évoqués sur le forum, il faut régler le protocole des ESCs en DShot150.
Pour aller plus loin, on peut activer le différentiel moteurs (afin d’avoir un semblant de YAW) en suivant par exemple cette procédure :
AtomRCPenguin-Propercareandfeeding(ReviewandHighAlphaGuide)-Yo.jpg.cd96faa9b2f04c8fc9f9e5509b350908.jpg)
AtomRCPenguin-Propercareandfeeding(ReviewandHighAlphaGuide)-Yo.jpg.976cb75228b71d7f9609383f26b26761.jpg)
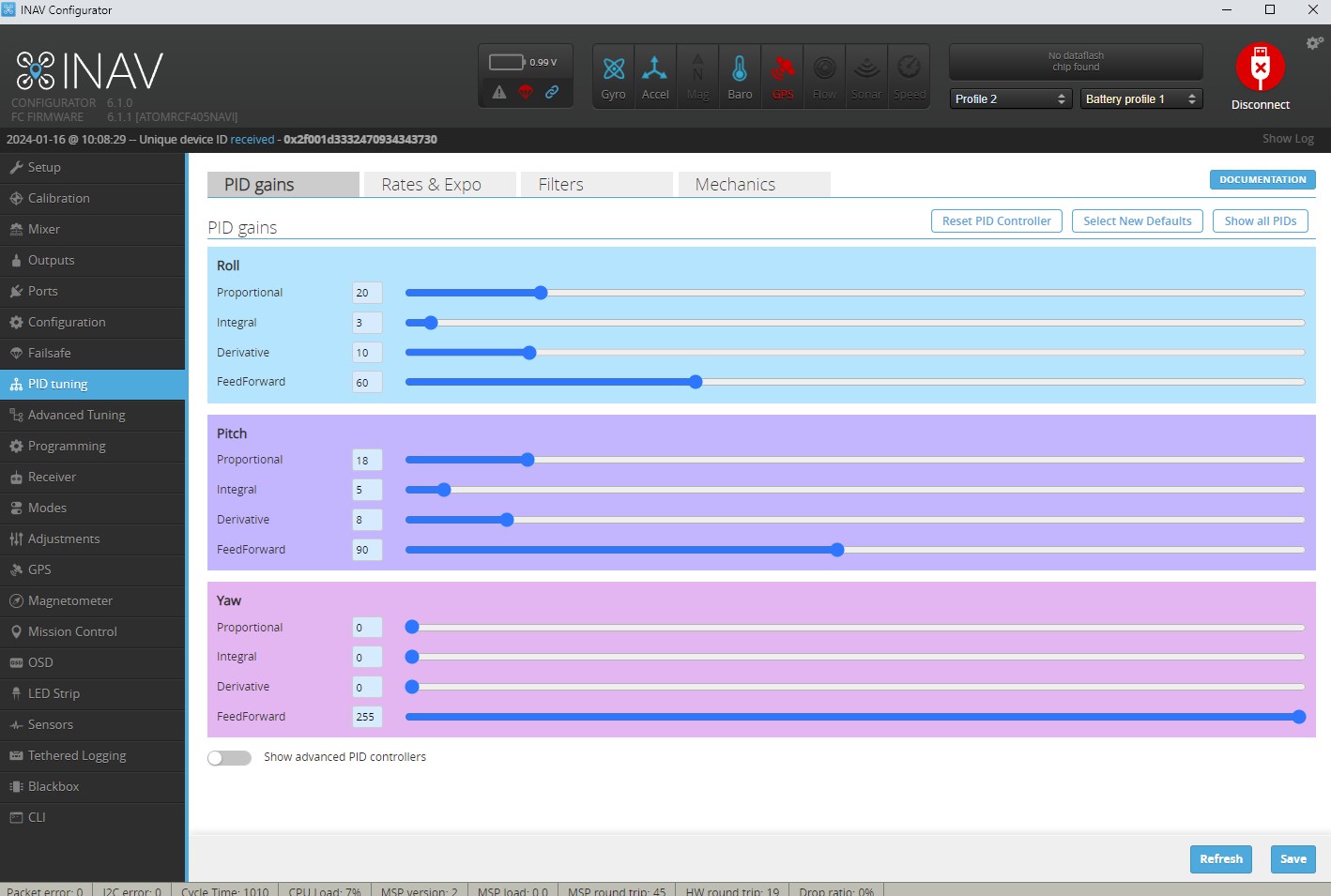
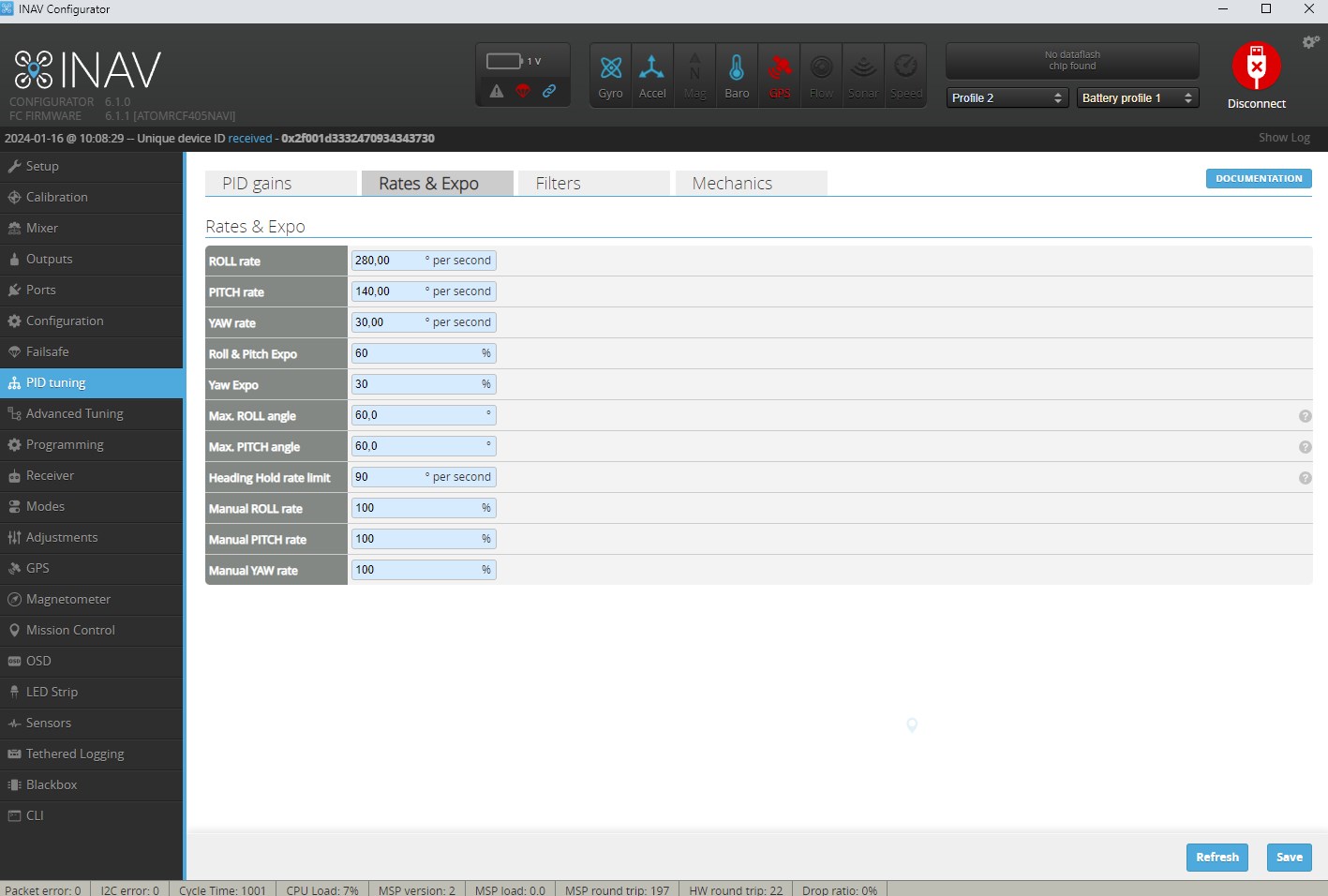
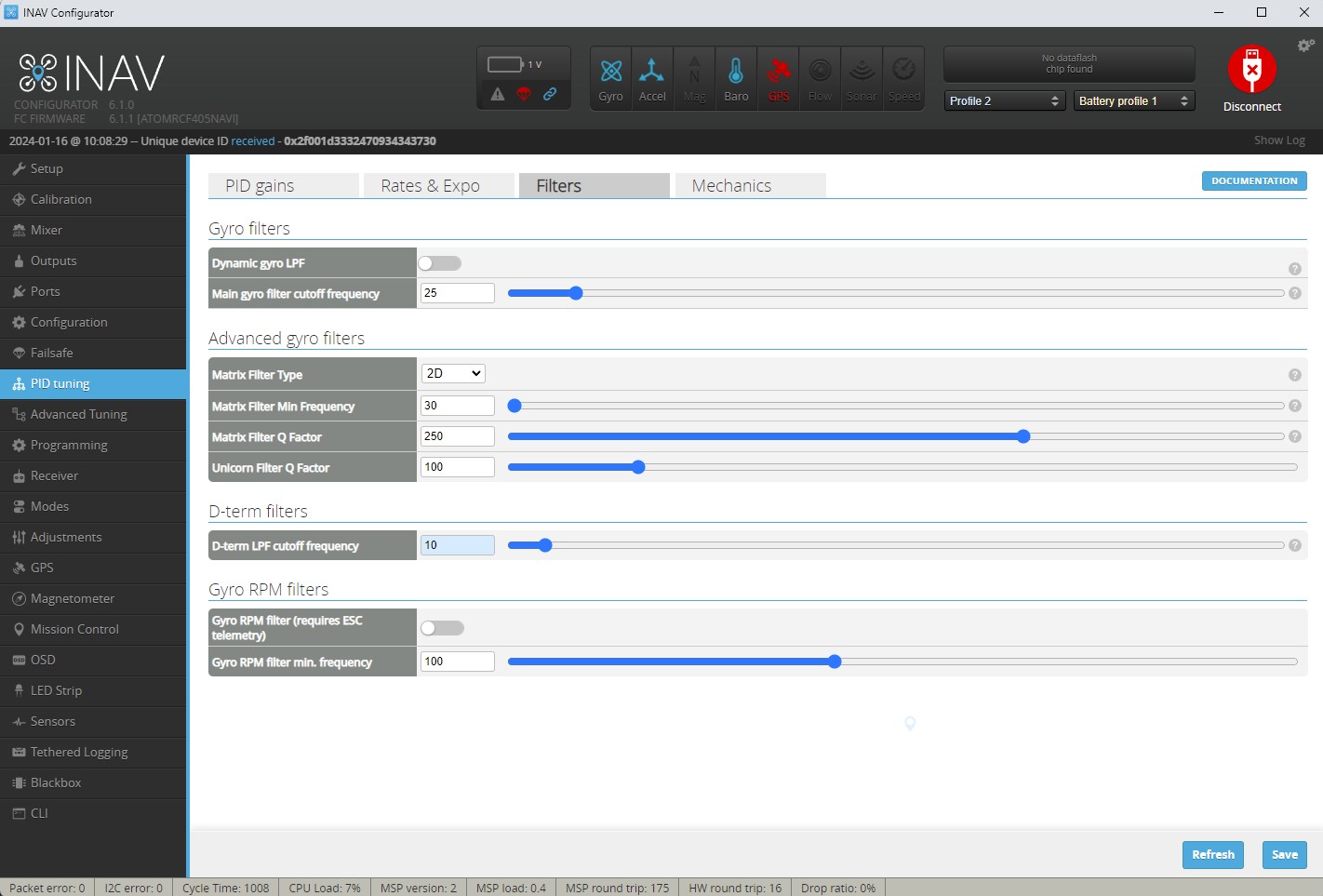
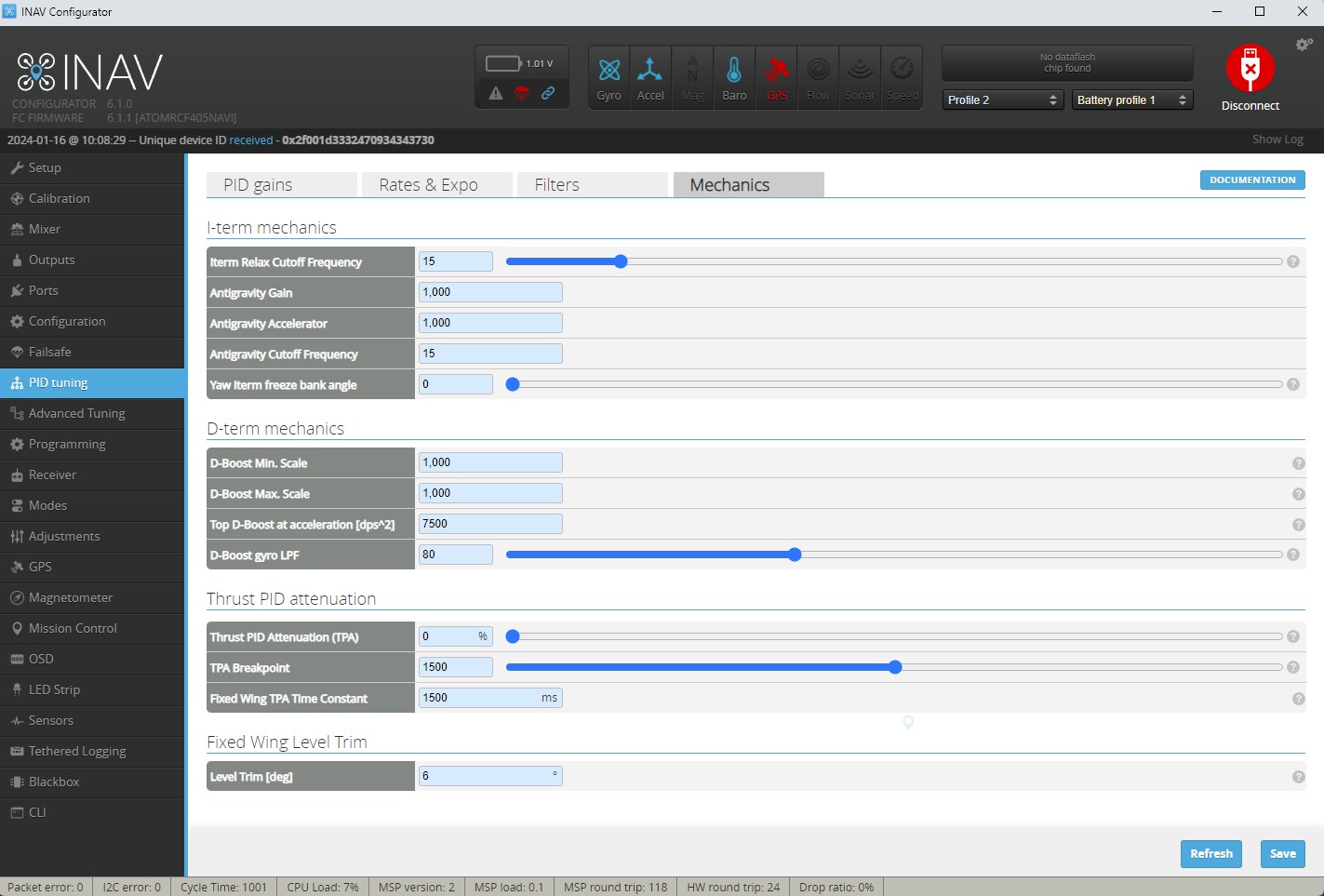
On peut aussi pousser les PID (et pourquoi pas les filtres) qui sont malheureusement par défaut dans le tune d’AtomRC :
Maiden
Avec le protocole moteur bien réglé, l’autolaunch fonctionne parfaitement et le décollage facilité. L’avion est très stable, facile facile à diriger et ce même à faible allure. Avec des rates un peu plus rapides et le différentiel moteurs, il devient encore plus joueur et se prête sans problème au jeu des manœuvres acrobatiques ! Si c’est ce que vous cherchez, ne touchez pas au débattement des ailerons. Si vous souhaitez juste faire de la balade tranquillement et longtemps, vous pouvez réduire un peu la course. Cependant, le réglage par défaut (au maximum) ne m’a ni choqué ni fait peur.
Des améliorations ?
En plus des modifications logicielles évoquées précédemment, on peut apporter quelques upgrades au Penguin en le protégeant par exemple avec du scotch d’emballage pas trop lourd type Tesa Pack. On peut aussi remplacer les winglets en EPP qui prennent cher à chaque crash et parfois même à l’atterrisage par des modèles en TPU comme ceux proposé par Notanamed Closed sur Thingiverse. Il a également un design de nez mieux ventilé pour O3.
Discuter et obtenir de l'aide pour l'AtomRC Penguin sur le forumPour finir, des moteurs type 2207 ou 2306 comme les T-Motor Velox V3 en 1750KV ou 1950KV qu’on a testé (attention tout de même avec les ESCs 30A d’origine) permettent d’accroitre à la fois le grip et l’autonomie de façon considérable, même avec les hélices d’origine.
Conclusion
Si vous avez visionné la vidéo et lu cet article vous l’aurez certainement compris, j’ai adoré cet avion FPV qu’est l’AtomRC Penguin. Le seul reproche que j’ai à faire au constructeur c’est le tune d’iNav. Je fais référence aux PID et filtres uniquement, tous les autres réglages, au dela près du DShot sont bons. Il en résulte un avion qui décolle facilement, aisément contrôlable en vol et ce même à très basse vitesse. Il convient donc parfaitement au débutants mais comme vous pourrez le constater sur les chaînes ci-dessous, il est tout autant adapté aux pilotes confirmés, que ce soit pour faire du freestyle ou du Long Range !
De plus, tout comme en 3 pouces, l’O3 prend tout son sens en aile volante, permettant un gain de poids tout en pouvant filmer en 4K stabilisée avec GyroFlow.
Les chaînes à suivre ▶️
Acheter l’AtomRC Penguin 🛒
Acheter l'AtomRC Penguin avec -5% grâce au code WaF 💰L’AtomRC Penguin est vendu 89$ en KIT, 149$ en PNP+S et 209$ en RTH directement dans la boutique officielle. Vous pouvez soustraire 5% à ces tarifs en saisissant le code WaF au moment de payer. Il faut penser à sélectionner l’entrepôt européen pour ne pas avoir de frais de douane et surtout une livraison généralement rapide !
Pour rappel, en suivant ces liens vous soutenez WE are FPV, même si c’est pour acheter d’autres produits et surtout sans que ça vous coûte plus cher. Si ce geste ne vous dérange pas, n’hésitez pas à cliquer sur ces liens (que vous pouvez également retrouver en barre latérale du blog et du forum) avant vos achats. Merci !
D’autres photos de l’AtomRC Penguin 📷