

Ce combo Pacer G4 + P60A v2 permet de profiter pleinement du firmware Alpha créé par FETtec, pour prendre le relais à la suite de KISS, un firmware qu’on ne vous présente plus.
La G4 & P60A v2 en vidéo

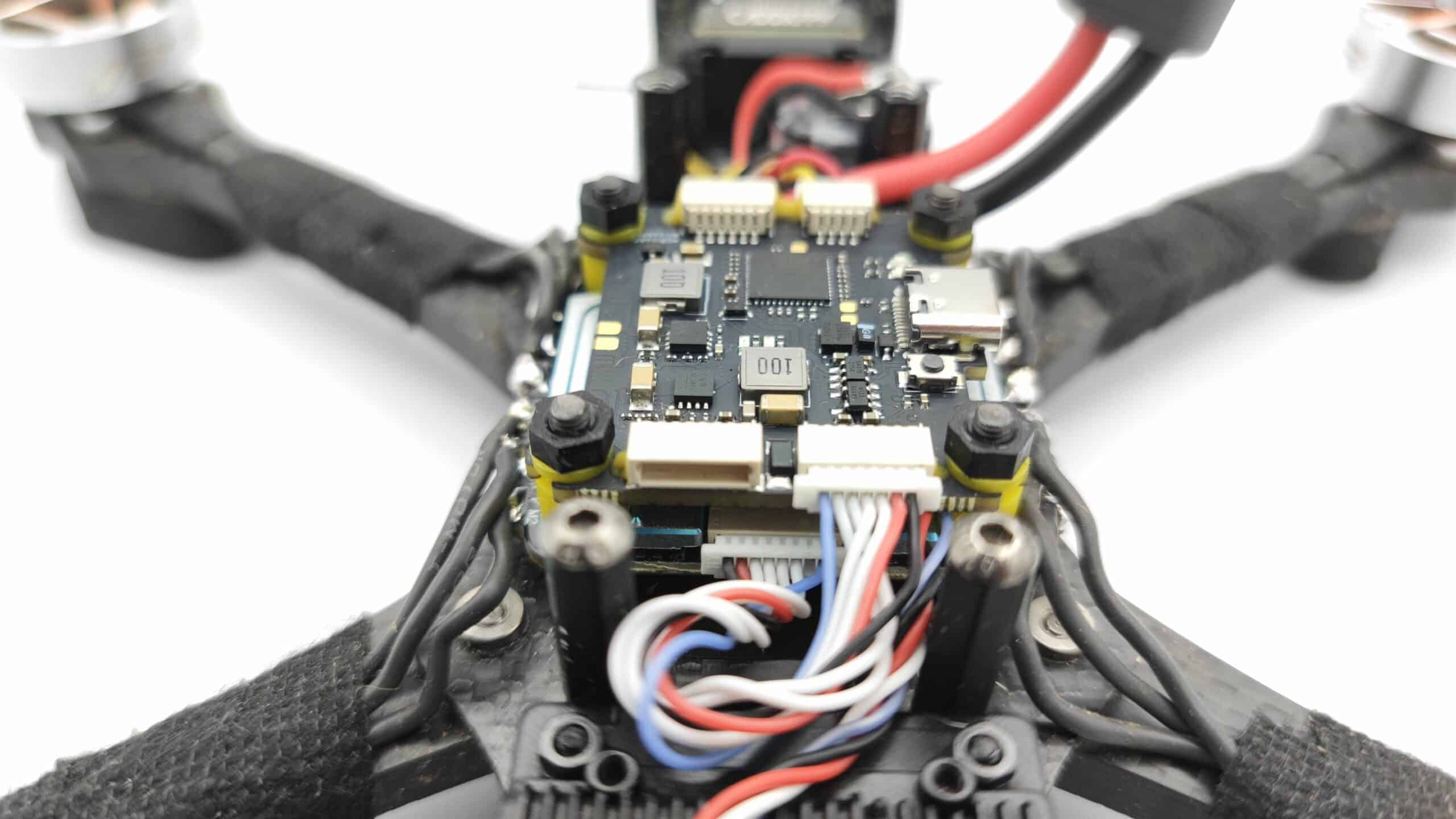
La FC G4 version HD de T-MOTOR
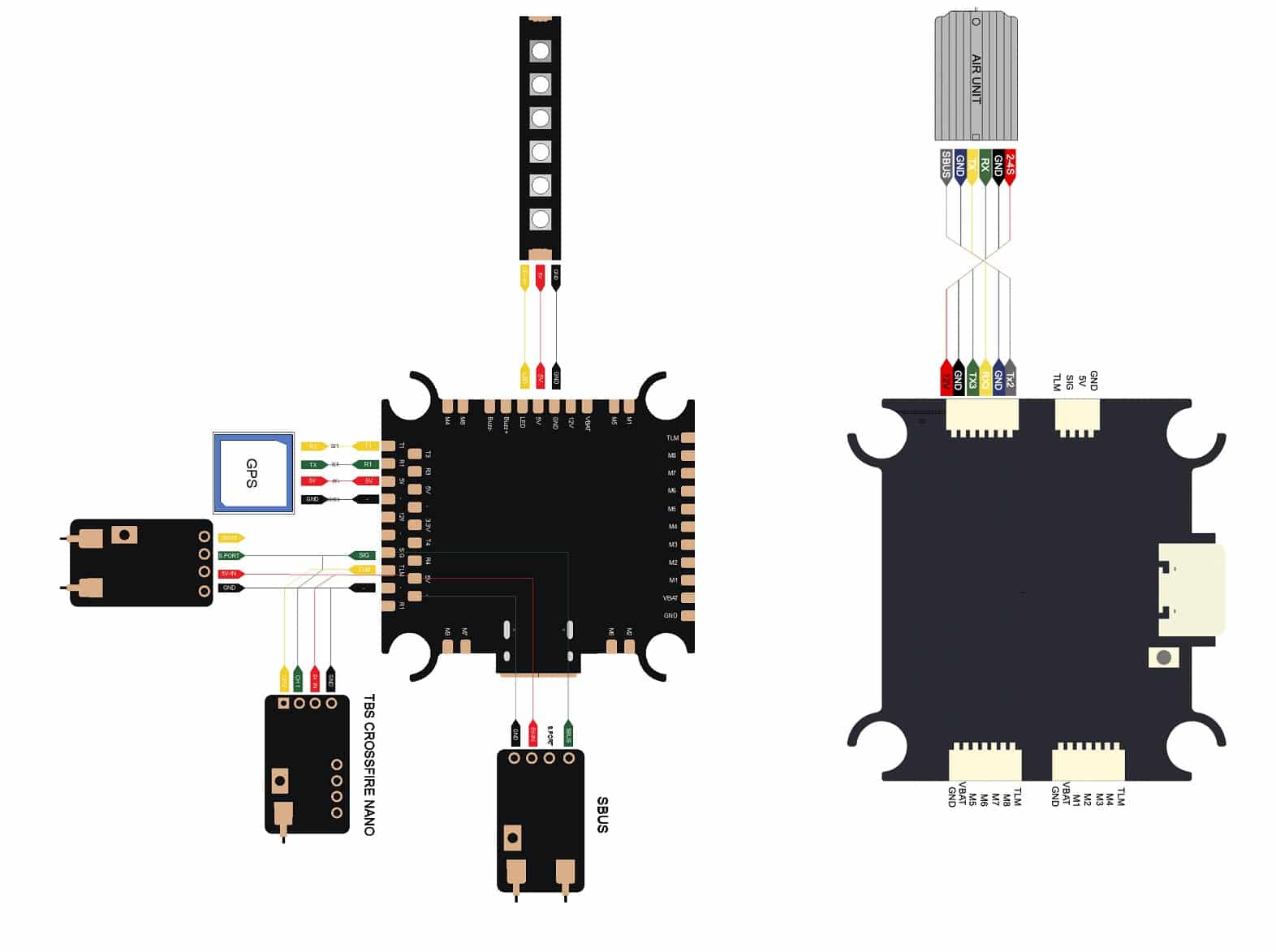
Une carte de vol dernière génération avec une optimisation des pads et des prises pour les ESC, vTx, Rx, GPS, LED ou encore Blackbox. Vous l’aurez compris, sur le papier cette G4 est parfaite pour un drone FPV 5″ freestyle.
Grâce à son Gyroscope IIM-42652 et sa compatibilité avec le DShot 2400, vous pourrez profiter pleinement des performances du firmware Alpha développé par FETtec.
Cependant, dans la pratique, ce n’est pas aussi simple qu’ils l’annoncent…
Vous êtes obligés de mettre Le vTx HD sur l’UART 3 ou 4. Vous êtes également contraints de brancher le récepteur sur les pads ou la prise prévue à cet effet (attention, le pad SIG correspond au Rx de la FC et le pad TLM au Tx de la FC).
Les ESC P60A v2
De dernière génération, ces ESC tournent sous BLHeli_32 sont compatibles DShot 2400 et PWM Frequency 128k. Les P60A v2 peuvent être alimentés de 3 à 6S avec un max current à 70A en pic et 60A continu. Ils sont aussi équipés d’un current sensor qui permet de mesurer l’ampérage consommé (jusqu’à 150A). Malheureusement, cette fonction n’est pas disponible avec la G4 de T-Motor et le firmware Alpha.

Le packaging est bien fourni, avec toutes sortes de câbles pour faciliter le montage en fonction de la carte de vol que vous avez choisi.
Alpha, le firmware
Une grande découverte pour moi, Alpha est censé reprendre le flambeau derrière KISS (sans aucun rapport avec KISS Ultra). Le but étant d’avoir quelque chose de simple et performant, sans passer des heures au tuning, et surtout, à la portée de tous (toujours sur le papier) !
Pour le configurer, il faut se rendre sur la page du GUI (uniquement sur navigateur). Vous pouvez suivre la vidéo pour mettre à jour (flash la FC) et configurer votre drone en Alpha.
Je trouve l’interface très archaïque et pas vraiment intuitive. Sous forme d’OSD, il faut naviguer d’onglets en onglets de nombreuses fois pour configurer des choses simples comme les inters (modes de vol) ou les UART (quand ils ne sont pas figés). Malheureusement pour Alpha, Betaflight est bien plus ergonomique (il est aussi bien plus ancien aussi !).
Déjà en service depuis plusieurs mois (années ?), certains aspects du GUI auraient déjà pu être modifiés pour rendre la navigation plus agréable. Comme le modèle de la FC qui n’a toujours pas été changé…
Si vous utilisez des ESC Betaflight (comme les P60A v2), pensez à mapper vos sorties moteurs. Attention, sur Betaflight et sur Alpha, les numéros de moteurs ne sont pas dans le même ordre.
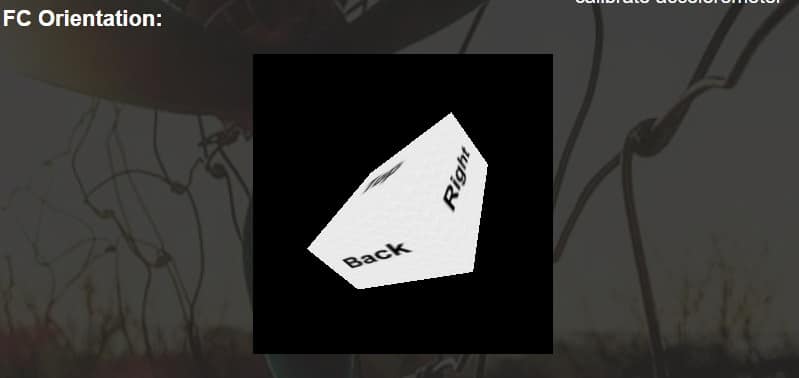
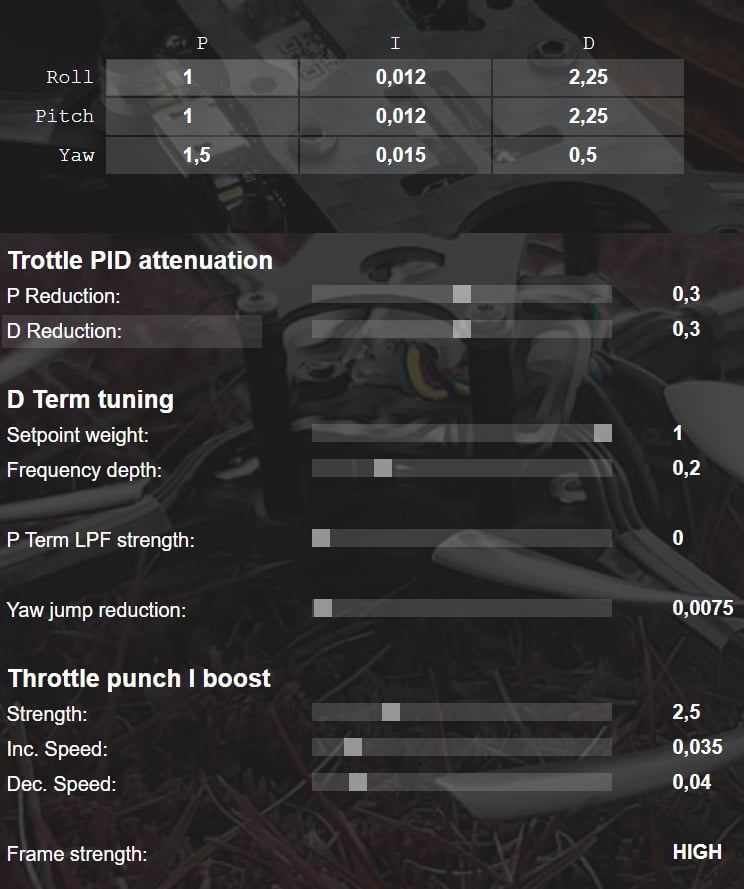
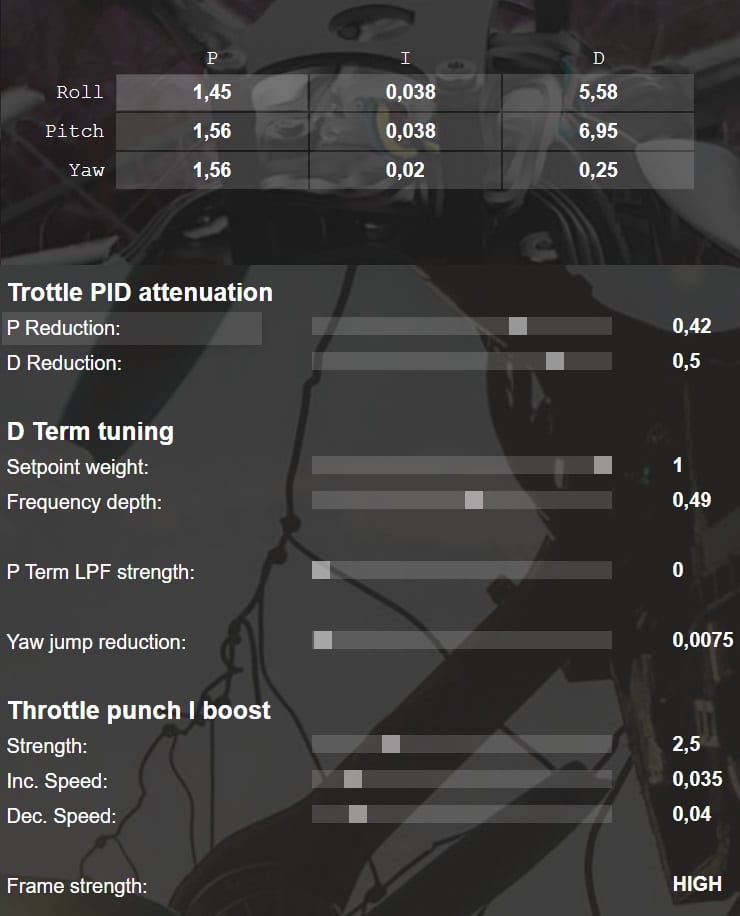
Voici les réglages stock de la G4 sur Alpha. Les valeurs sont bien différentes des autres firmwares et les réglages possibles sont moins nombreux. On apprécie d’ailleurs les explications au-dessous de ces pages de réglages pour nous aiguiller dans la configuration.
Avec cette G4 et Alpha, il n’est pas nécessaire de choisir un protocole radio. Que vous soyez en Ghost, SBUS, CRSF ou autre, le type de lien radio sera automatiquement détecté et appliqué.
C’est pratique, quand ça fonctionne… Mon Rx Nano BetaFPV en ELRS a été détecté en Ghost, il a fallu que je choisisse CRSF moi-même.
Alpha, tuning et PID
La phase de tuning a été longue et pénible pour moi. Devoir ajuster les valeurs une à une, sur chaque axe, Pitch, Roll et Yaw prend du temps. Il est beaucoup plus plaisant de jouer avec des sliders comme dans Betaflight (à mon gout).
Je n’ai malheureusement pas réussi à effacer un rebond sur le pitch, même après 2h de tuning et 10 LiPo.
Le feeling en vol ne me convenait pas non plus. J’apprécie les quads incisifs et vifs. Avec Alpha, nous sommes plus sur un feeling smooth et lissé. Avec les réglages par défaut, le feeling était déjà bon (à l’image de FETtec et Alpha). La phase de tuning n’a pas beaucoup changé le comportement en vol.
J’apprécie par contre le comportement du I sur ce firmware qui verrouille le drone en l’air. À chaque momentum (gaz coupé, en l’air), on a la sensation de léviter pendant plusieurs secondes. C’est très particulier !
Voici mes réglages, pour vous donner un ordre d’idée sur l’évolution des PID. À savoir qu’il existe aussi des presets 5″ beaucoup moins poussés dans les chiffres.
Conclusion
Le combo Pacer de T-Motor haut de gamme est vraiment bien fourni en accessoires (comme toujours avec cette marque). Les performances sur le papier sont optimales et ce qui se fait de mieux aujourd’hui. C’est aussi ce qui explique le prix très élevé de la FC G4HD et des ECSs P60A v2.
T-Motor aurait dû rester sur une compatibilité Betaflight pour cette stack. Alpha ne met pas en valeur cette électronique… Surtout, le feeling pourrait être adapté aux souhaits de chaque pilote plus aisément. Le GUI FETtec est malgré tout très fermé au tuning.
Le GUI n’est pas intuitif. La phase de tuning (pas réellement obligatoire…) est pénible et archaïque. Les sensations en vol sont particulières et rigides (je n’ai pas réussi à transformer ma brique de beurre en couteau bien aiguisé).
Pour finir, c’est pour moi de l’électronique de qualité, avec un firmware inabouti et donc un rapport qualité prix que je ne recommanderai pas…