
Après un premier tuto de tuning, sur le terrain, et en utilisant que les sliders, on va décortiquer le fonctionnement d’un contrôleur de vol avant de s’attaquer à l’analyse de Blackbox, pour améliorer notre précédent tune.
Introduction
Dans le précédent tuto, on a mis l’accent sur la méthodologie de tuning, pour vous donner une idée plus concrète de comment les choses se passent en pratique sur le terrain.
Ce second tuto sera beaucoup plus poussé et devrait vous permettre d’avoir une meilleure compréhension du fonctionnement de votre quad. Une fois les mystères de la boucle PID dévoilés, on aura les bases pour appréhender l’analyse de Blackbox. On pourra analyser puis optimiser le tune que l’on a obtenu au terme du premier tuto.
La vidéo est très longue, mais on tenait à traiter ces 2 sujets d’un coup. Une bonne compréhension de la Blackbox passe par une bonne compréhension du fonctionnement du contrôleur de vol.
Cet article sera un complément à la vidéo. On y traitera les points qui n’ont pas pu être abordés dans la vidéo.
Le tuto, en vidéo

Ressources à télécharger
Dans la vidéo, on évoque plusieurs fichiers ou liens, on va les regrouper ici :
- Support de présentation : Controleur_de_vol_PID.pdf
- Espace de travail Blackbox Explorer : workspaces.json
- Blackbox du tune aux sliders : 01_tune_sliders.bbl
- Blackbox du tune optimisé : 02_tune_bb.bbl
- Blackbox d’un vol Freestyle : my_tune_vol_3min.bbl
- Betaflight Processing & workflow charts / diagrams
- Blackbox Explorer
- PIDtoolbox
Démonstration des PID en action
Dans le tuto, on explique et on visualise l’action des PID. Si tout n’est pas encore clair, on ne peut que vous recommander cette vidéo de moins de 2 minutes !

Dans le même genre, cette seconde vidéo est aussi très intéressante.
Le Dynamic Idle, la fonctionnalité sous-cotée
Cette fonctionnalité est très sous-estimée, elle est pourtant très utile. D’ailleurs, les modifications apportées par la version 4.3 de BetaFlight rendent son usage beaucoup simple.
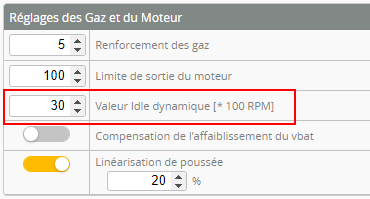
Dans la première vidéo, on a vu comment le Dynamic Idle nous a aidé à améliorer la stabilité de notre drone : en augmentant la vitesse de nos moteurs quand les gaz sont coupés, cela permet de renforcer l’autorité des PID avec les gaz à zéro.
Dans les commentaires du précédent tuto, [BOMBA], qui a l’habitude de voler à la montagne dans des conditions de vent compliquées, nous expliquait qu’il utilisait beaucoup le Dynamic Idle pour contrer les effets du vent, avec des valeurs allant jusqu’à 40 sur un 6″ !
Néanmoins, plus cette valeur augmente, plus on perd en « hangtime » quand on laisse retomber le drone la tête en bas (les moteurs poussent plus fort vers le sol). Une valeur élevée aura aussi tendance à faire « planer » un peu plus le quad quand les gaz sont coupés.
En plus d’améliorer la stabilité, le Dynamic Idle :
- limite les risques de desync
- donne plus de contrôle dans le bas des gaz en permettant aux moteurs de réagir plus vite
- permet de freiner le quad plus efficacement
- d’avoir un arrêt plus net lors des flips et des rolls rapides
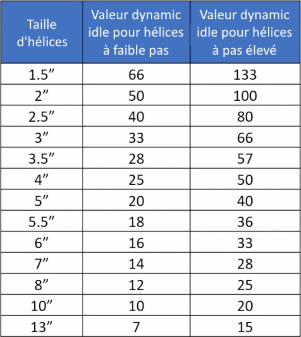
Cette fonctionnalité est très efficace, mais il faudra l’adapter à votre usage : on privilégiera des valeurs assez hautes pour du midrange (autour de 40) ou du cinématique, alors qu’on sera un peu plus light pour du Freestyle où l’on souhaite ne pas trop pénaliser le hangtime la tête en bas (autour de 30 pour un 5″).
Il y aurait énormément de choses à dire sur son fonctionnement qui est assez complexe, n’hésitez pas à consulter la page du Wiki Betaflight pour en savoir plus.
Activation de la Blackbox
On en a parlé rapidement dans la précédente vidéo lors de la pré-configuration du quad sous Betaflight : pour analyser des vols, il faut activer l’enregistrement de la Blackbox sous Betaflight.
Dans les Modes, vous pouvez dédier un inter à l’activation/désactivation de la Blackbox. Dans le cas contraire (aucun mode), Betaflight enregistrera une Blackbox systématiquement à chaque armement (tant qu’il y a de la place en mémoire).
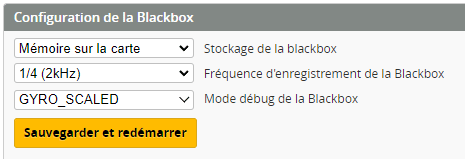
Deux réglages importants : s’assurer d’enregistrer à 2Khz environ (avec un BMI270, on choisira 1.6Khz) et activer le mode de debug « GYRO_SCALED », pour enregistrer le signal gyro non filtré.
Après le vol, pour récupérer la blackbox, on cliquera sur le bouton « Activer le Mode de périphérique de stockage de masse », on pourra alors récupérer les fichiers comme si notre FC était une clé USB.
Pensez à vider la blackbox régulièrement pour ne pas manquer de place :
Blackbox Explorer
N’hésitez pas à cliquer sur le « ? » pour voir l’ensemble des raccourcis claviers disponible dans l’application.

En particulier les touches « I » et « O », pour analyser une portion de la blackbox. C’est particulièrement utile pour supprimer le décollage et éventuellement l’atterrissage qui peuvent éventuellement ajouter du bruit qui ne doit pas être pris en compte pour juger du vol.
La touche « M » permet de poser un marqueur et mesurer le temps écoulé depuis ce marqueur. Pratique pour identifier la durée de décalage entre la consigne et le signal gyro par exemple, et estimer la latence.
Enfin, vous pourrez cliquer sur « i » pour afficher la configuration du contrôleur de vol pour la blackbox en cours :
A noter que si vous avez la vidéo du vol, vous pouvez aussi l’afficher en fond dans Blackbox Explorer :
Enfin, si durant la même lipo, vous avez armé et désarmé plusieurs fois votre quad, la Blackbox sera découpée en plusieurs parties. Vous pourrez accéder à chacun des vols effectués sur la lipo grâce à la liste déroulante, en haut de la colonne de droite :
PIDtoolbox
Pour installer PIDtoolbox, suivez bien les instructions indiquées sur la page d’accueil du projet. Sur certains de mes PC, il est assez capricieux quand je le lance depuis le répertoire « Program Files » où il sera automatiquement copié. Si vous rencontrez des problèmes au moment de charger une blackbox, vous pouvez :
- soit le démarrer en mode Administrateur
- soit le lancer depuis votre répertoire de téléchargement.
A noter qu’il est recommandé de désactiver le Feedforward lors de l’utilisation de l’outil « Step Response » de PIDtoolbox. Ce n’était pas le cas dans mes blackbox car je j’utilise très peu PIDtoolbox. Je ne suis pas intéressé par cette vue « agrégée » des données soumises à contraintes. Je préfère utiliser Blackbox Explorer pour voir ce qui se passe réellement. Mais on voulait quand même vous présenter cet outil très utilisé dans la communauté, en particulier pour son module « Step Response ».
Le TPA
On en parle rapidement dans la vidéo au moment de l’analyse du schéma de fonctionnement de Betaflight. Il permet d’atténuer l’effet des D lorsque pour des niveaux de gaz élevés.

Avec les valeurs par défaut, le TPA va s’activer à partir d’une position du stick des gaz à 1350 (sachant que ça va de 1000 à 2000). A 1350, les D seront atténués de 0% et à 2000 ils seront atténués de 65% (0.65). Entre les 2, la valeur d’atténuation évoluera de manière linéaire.
On y a pas touché dans notre tuto. Ca peut être une bonne idée de remonter son seuil d’activation pour avoir des valeurs de D plus constantes sur une large bande de gaz. Idéalement, on positionnera son seuil au moment où l’on commence à constater des oscillations (bruit strident) liées aux D. Une valeur de 1750 est souvent recommandée.
A noter que vous pouvez restaurer l’ancien fonctionnement du TPA, pour qu’il agisse à la fois sur les D et sur les P. Il faudra taper la commande suivante dans le CLI : set tpa_mode = PD.
Le TPA est un moyen de pousser les PID un peu plus haut, sans pour autant rencontrer de problème dans le haut des gaz.
Le cas des gyros défectueux
Cet un cas épineux, dont j’ai fait les frais quelques fois ces derniers temps. On en parle un peu dans la vidéo.
Quand notre quad à un comportement anormal, avec plein de vibrations alors qu’on pense avoir tout bien vérifié, une cause possible est un gyroscope défectueux. Si on a une autre FC sous la main, le remplacement pourra confirmer que le problème est bien lié à la FC, et probablement au gyro.
Très souvent (mais pas toujours), un gyro est défectueux sur un seul axe. Un autre moyen de vérifier son gyro, si l’on constate des vibrations suspectes sur un axe en particulier, c’est de pivoter le gyro de 90° pour inverser le pitch et le roll : si le problème change d’axe, c’est qu’il s’agit bien d’un gyro défectueux sur un axe. Il faudra changer la FC.
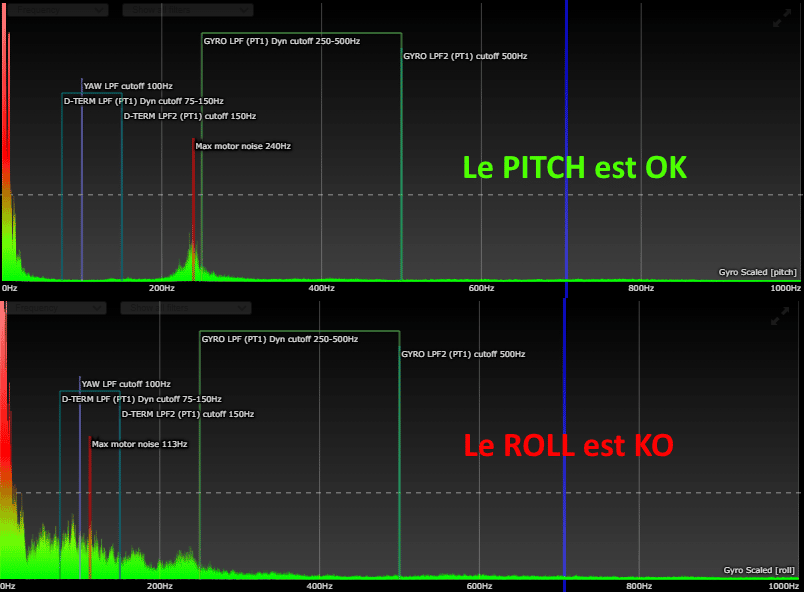
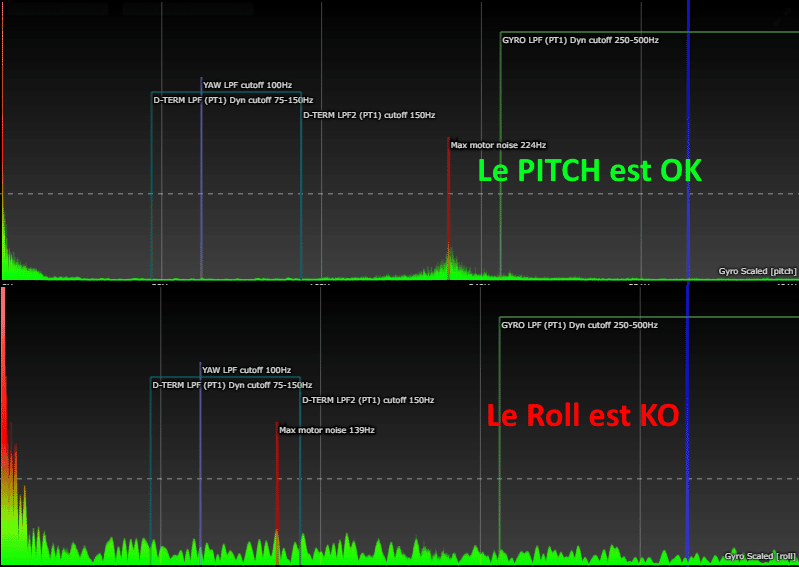
Le seul moyen de bien voir ce qu’il se passe dans ce cas là, c’est de faire une Blackbox et d’observer le bruit sur les différents axes. Beaucoup de bruit avant les 200 Hz peut être un signe de gyro défectueux. Si vous suivez le signal gyro sur un roll ou un flip lent (donc sans gaz) et que vous observez des oscillations, c’est aussi un indice qui suggère un gyro défaillant.
Voici 2 exemples de gyro défectueux sur un axe rencontrés ces derniers mois :
Feeling vs Blackbox
Gardez en tête que le plus important reste le feeling que vous aurez en vol. La blackbox donne une vision d’ensemble de votre tune, mais elle ne peut pas deviner l’usage que vous en ferez.
Par exemple, si vous faites surtout du cinématique et du midrange, monter le Dynamic Idle plus haut donnera une meilleure stabilité, en particulier si les conditions météorologiques sont difficiles. Pour du Freestyle, on ne voudra pas en abuser si le « hangtime » tête en bas est important pour nous. Pour du cinématique, on évitera d’abuser du FeedForward (Réponse des sticks) et on pourra pousser un peu plus le RC Smoothing. En course, on privilégiera la réactivité du quad, avec des P élevés, et peu de RC Smoothing etc.
Conclusion
Avec ces 2 tutos, vous devriez avoir une meilleure compréhension du fonctionnement de votre quad et avoir les outils et connaissances nécessaires pour le régler correctement.
Evidemment, on est loin d’avoir tout traité tant ce sujet est vaste, mais on en a vu assez pour vous donner les bases qui vont permettront d’aller plus loin par vous-même. On exclue pas de faire quelques autres tutos sur des points plus précis à l’avenir. Par exemple, si nécessaire, le tuning avec un gyro BMI270 fera peut-être l’objet d’une autre vidéo.
Et n’oubliez pas, la Blackbox, c’est pratique pour beaucoup de choses, mais il ne faut pas en abuser : une blackbox « parfaite » n’est pas forcément ce que vous devez rechercher. Le feeling et votre type de vol sont au moins aussi importants.
Si besoin, vous trouverez de l’aide sur le groupe Facebook, le forum et le serveur Discord WAF (qui dispose d’un channel dédié « Tuning-pid »).