
Après le paramétrage des filtres (dont les prérequis valent aussi pour les PID), je vais vous parler un peu des PID et vous expliquer comment je les règle. Encore une fois, j’ai conçu « mon protocole » de réglages à partir de documentations et d’informations glanées ici et là. Je ne demande qu’à le compléter et le corriger si nécessaire alors n’hésitez pas à me laisser des commentaires.
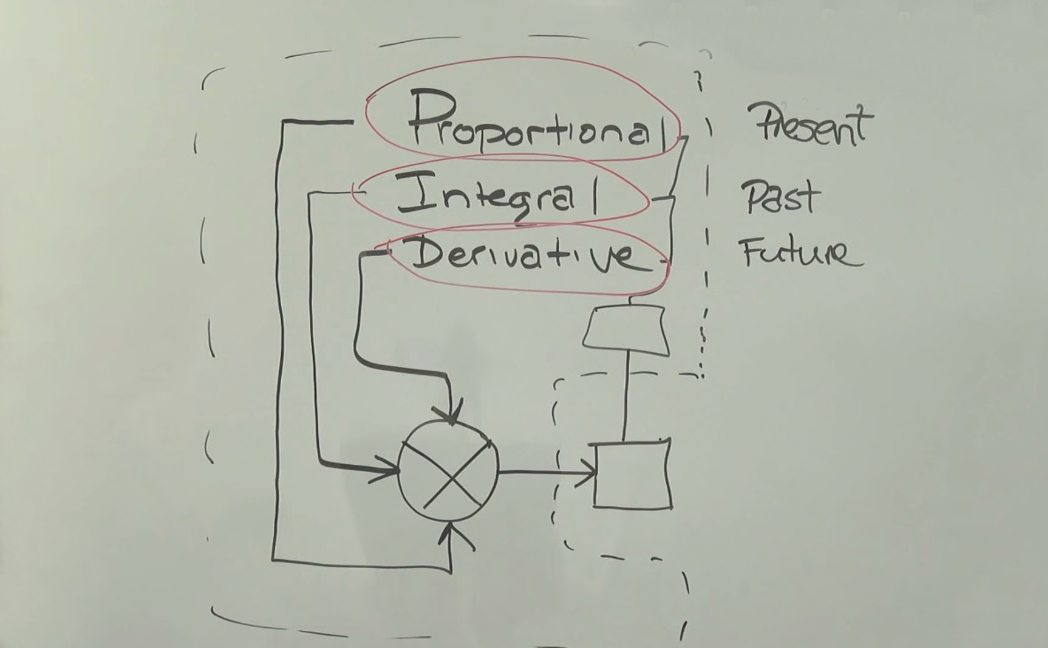
La boucle PID est un algorithme mathématique qui envoie une commande au drone. La valeur de cette commande est calculée à partir de la différence entre la consigne (vitesse angulaire demandées par les sticks de la radiocommande via les réglages de rates et expo) et la mesure (position du drone donnée par le gyroscope).


Une vidéo pour comprendre les PID
Ma vidéo préférée d’explications des PID (que sont-ils et que font-ils) est en anglais malheureusement. Mais les explications imagées d’RCModelReviews restent compréhensibles avec la traduction automatique de Youtube. Je vous conseille vraiment de la visionner si vous ne comprenez pas du tout ce que font les PID :

Régler les PID
Au début le tuning des PID peut faire peur. Mais en s’attardant un peu sur le fonctionnement de chaque paramètre et en testant différentes valeurs on s’aperçoit vite de leurs actions sur le quad. Une fois les réglages effectués je vous garantis que le comportement du quad n’a rien à voir !
Baisser les D (Derivative)
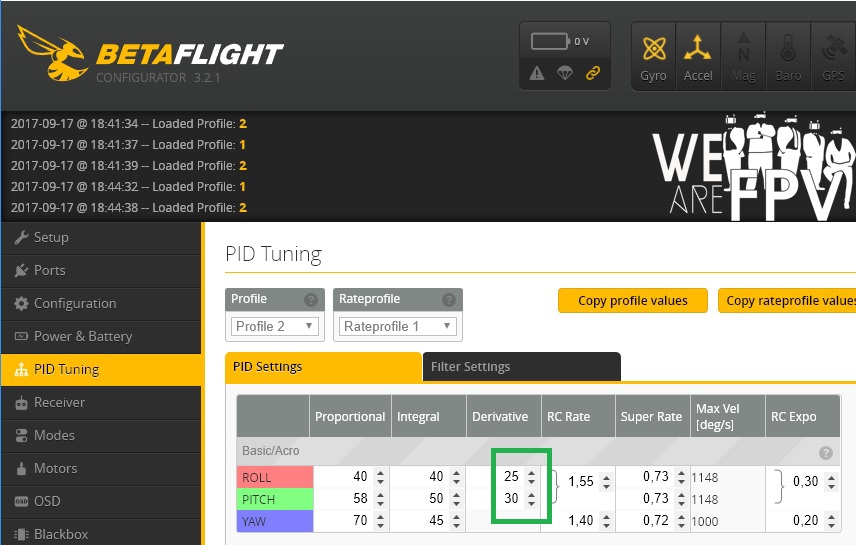
Le D vient atténuer l’action du P en fin de mouvement. On y reviendra après mais pour obtenir des P aux petits oignons, il faut d’abord baisser un peu les valeurs de D. En effet, encore une fois, BetaFlight est configuré par défaut pour convenir à un maximum de multirotors. Les réglages de base ne sont donc pas optimaux.
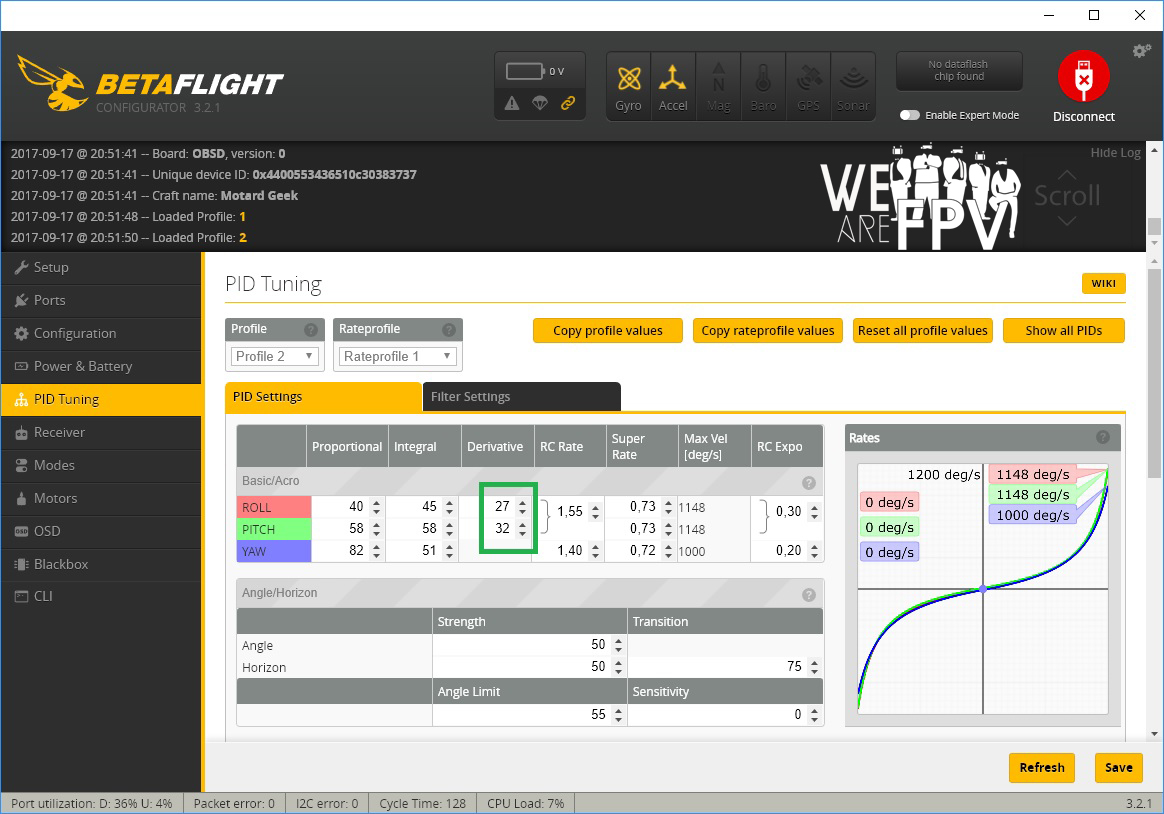
En ce qui me concerne, je réduis les D d’environ 15% pour le Roll et le Pitch :
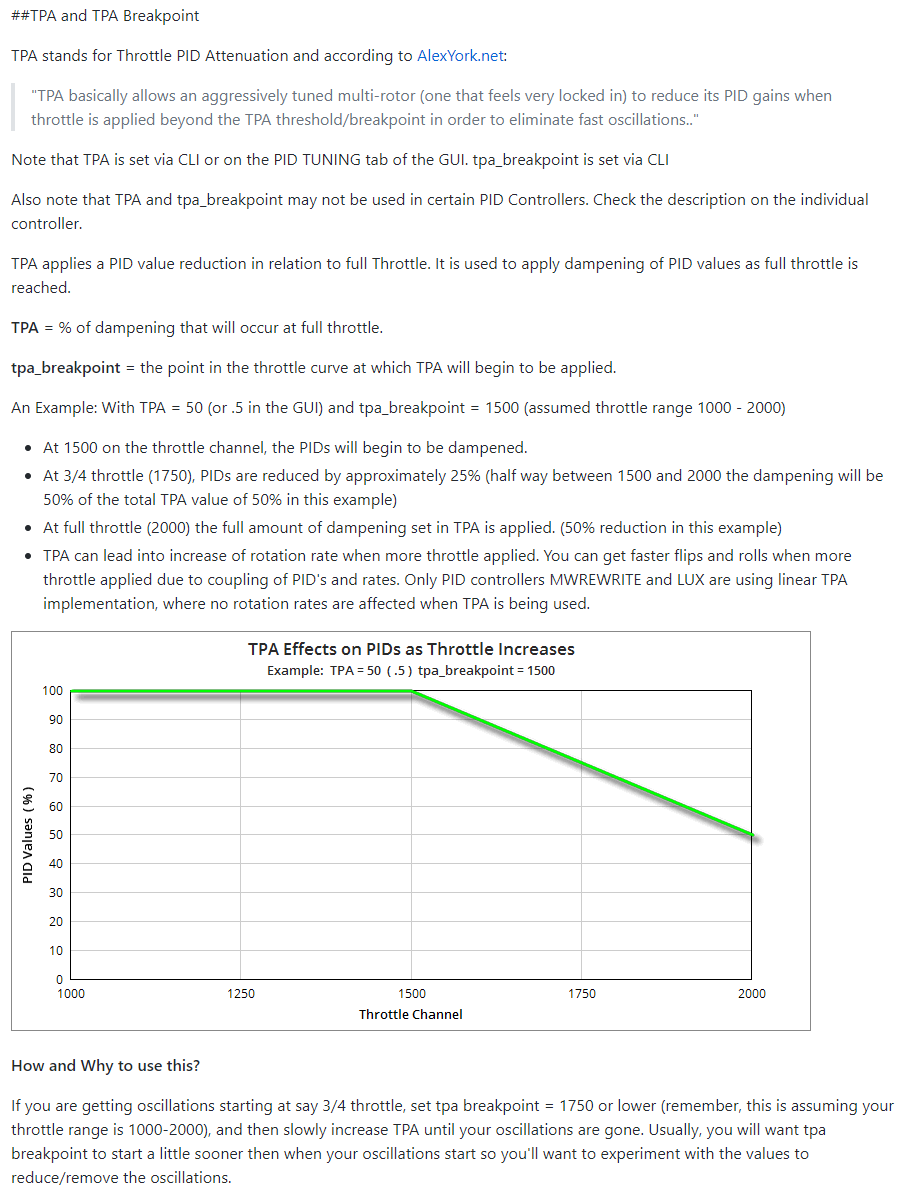
Le TPA (Throttle PID Attenuation)
Le TPA vient également atténuer les P mais aussi les I et D. La réduction de leurs effets s’effectue à partir d’un certain seuil de gaz (le TPA Breakpoint) mais également proportionnellement au niveau de gaz (plus les gaz montent passé le breakpoint plus l’atténuation est forte).
Il y a quelques temps je modifiais le TPA après le P pour réduire les vibrations à hauts régimes plutôt que de baisser les P directement. Mais d’expérience, je sais que je vais avoir à le monter. Du coup je mets d’office une valeur comprise entre 0.15 et 0.20. Ça me permet de mieux monter les P :
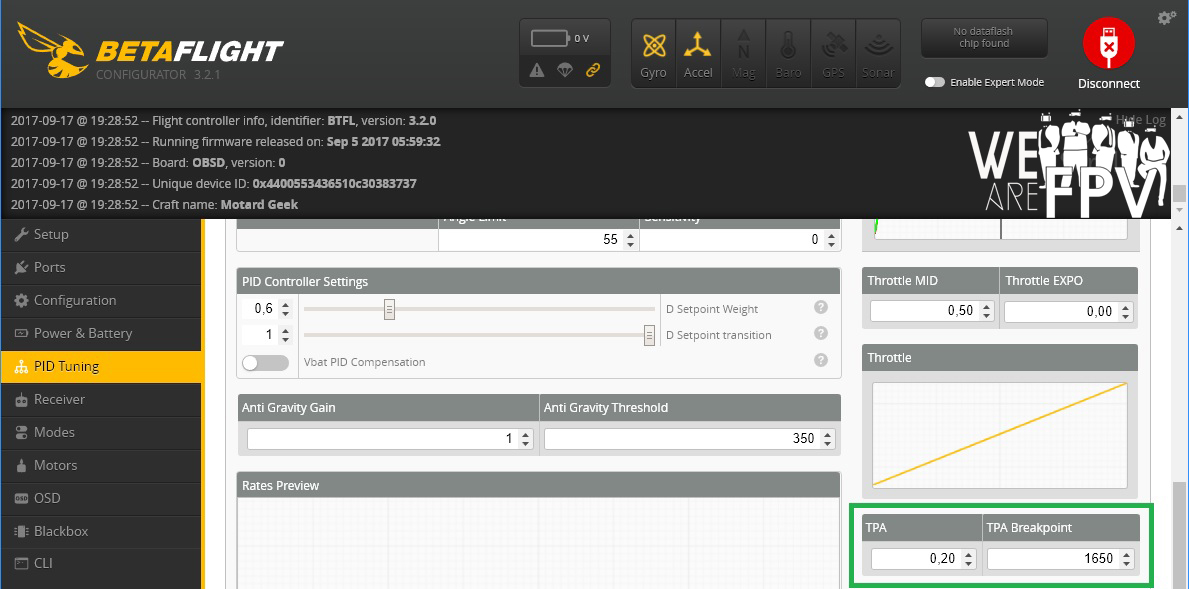
Il sera peut-être nécessaire d’affiner un peu ce TPA à la fin des PID, on y reviendra.
Monter les P (Proportional)
Le P c’est la valeur qui vient corriger la position du drone par rapport à celle demandée au moment présent. Plus sa valeur est haute plus le quad sera stable, réactif et précis.
Cependant, une valeur trop excessive peut générer des oscillations (qui vont se traduire par des vibrations du drone) voire une perte de contrôle de l’engin volant (le fameux death roll).
Il faut donc monter les P et surtout effectuer les tests avec précautions. Personnellement j’augmente directement les valeurs de 15 à 20%. Voici un exemple de P de départ raisonnables sur un 5′ sain en 4S :
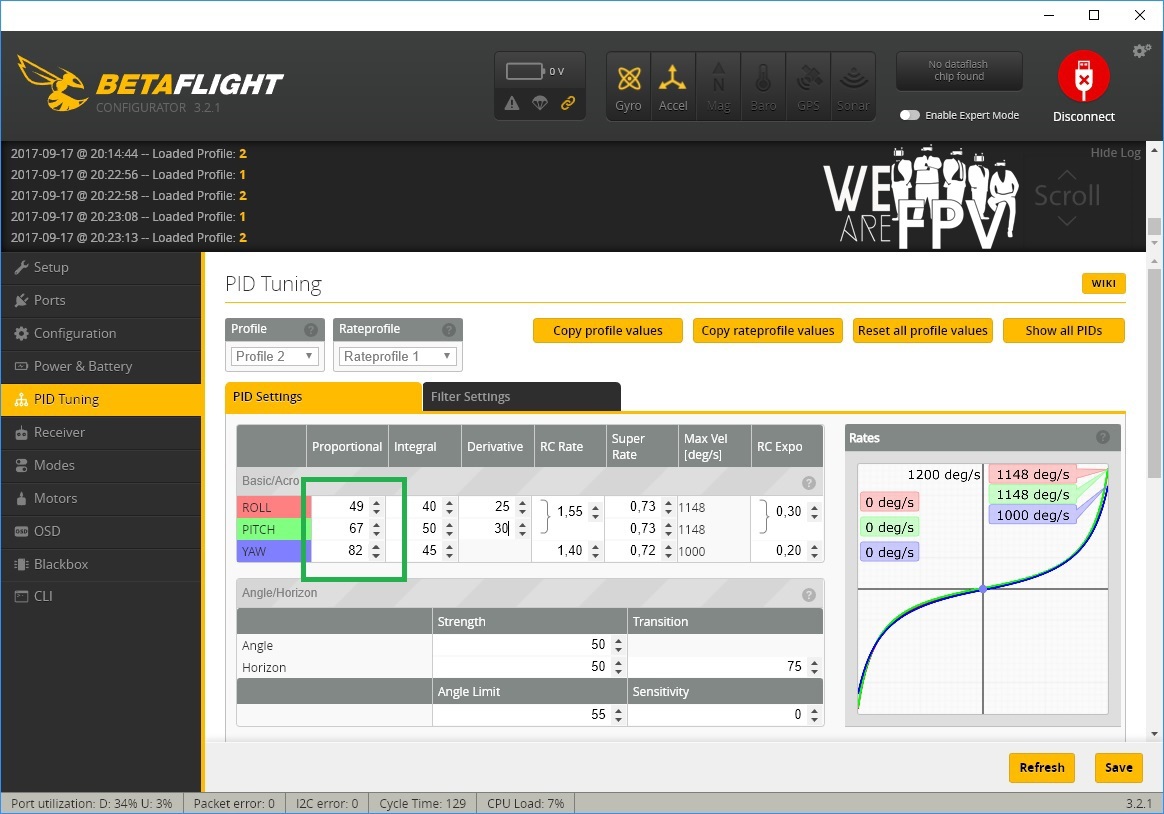
Vous pouvez ensuite continuer par petits incréments entre 1 et 3 par exemple.
A noter que c’est la méthode mathématiques pour obtenir un quad réactif et précis. De mon côté j’ai vraiment pas un bon feeling avec les réglages par défaut. Mais sachez que certains baissent les P… Et même des pilotes talentueux comme Pablo Sotes qui a expliqué ça dans un live Facebook il n’y a pas très longtemps.
Chacun fait comme il veut. Essayez-donc et faites-vous votre propre avis.
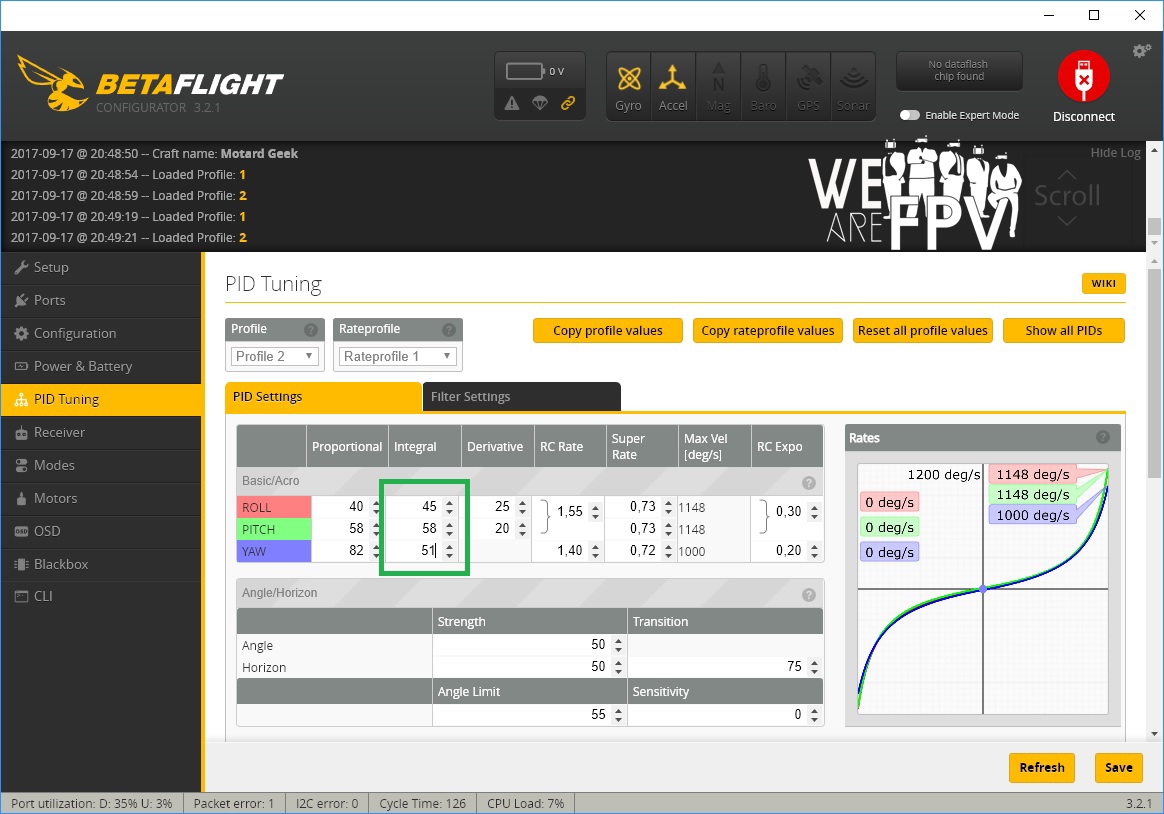
Monter les I (Integral)
Le I sert à maintenir la dernière consigne dans le temps. Encore une fois, mathématiquement parlant, il faut l’augmenter pour avoir un quad « locké ». Mais pas trop sinon des oscillations vont apparaître.
En parlant de maths, si vous voulez voir à quoi ressemblent ces oscillations sur un graph, je vous conseille cette vidéo (en français cette fois ci) :

Pour les I, je commence donc par augmenter les valeurs d’origine de 10%. Puis, comme pour les P, j’affine plus tranquillement. Voici les réglages sur lesquels je pars généralement sans même avoir volé :
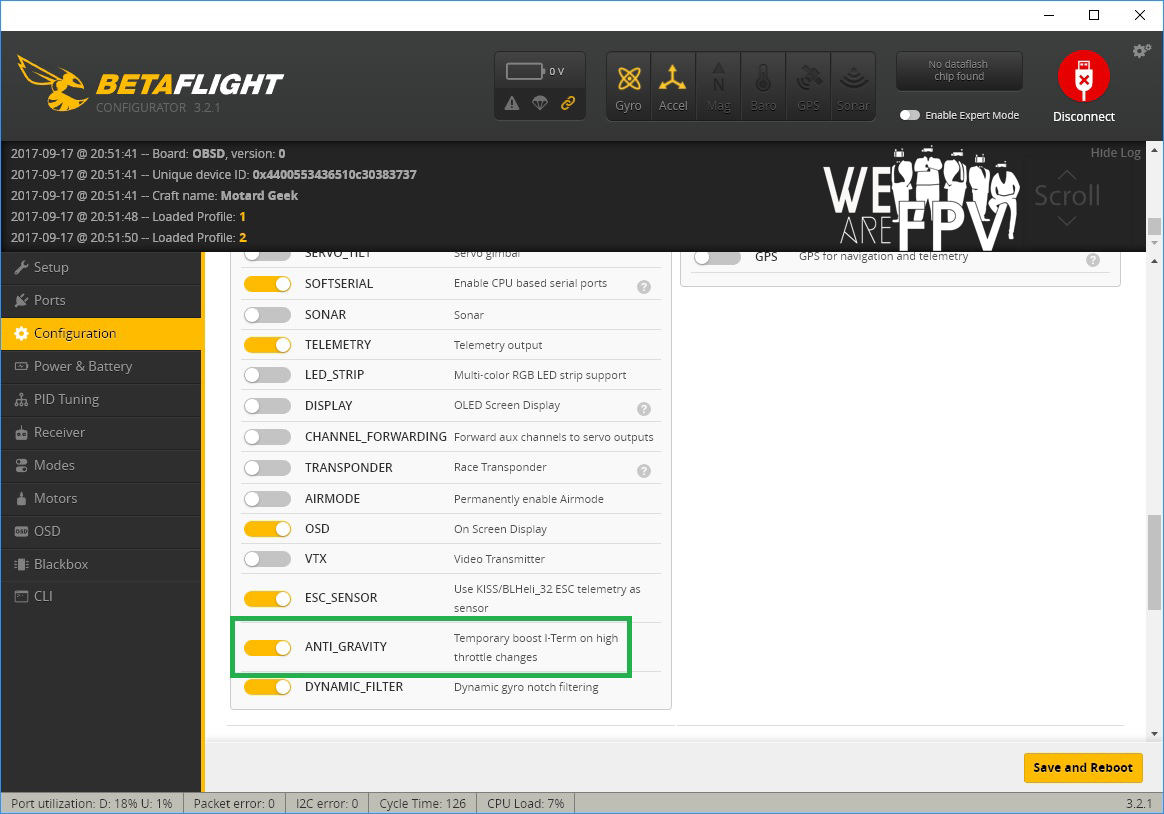
L’Anti Gravity
A l’inverse du TPA, l’Anti Gravity booste le gain I lors des gros coups de gaz. Cela évite les déviations intempestives sur des axes non contrôlés.
Joshua Bardwell explique et illustre très bien cette nouvelle fonctionnalité introduite avec BetaFlight 3.1 dans la vidéo suivante (en anglais) :

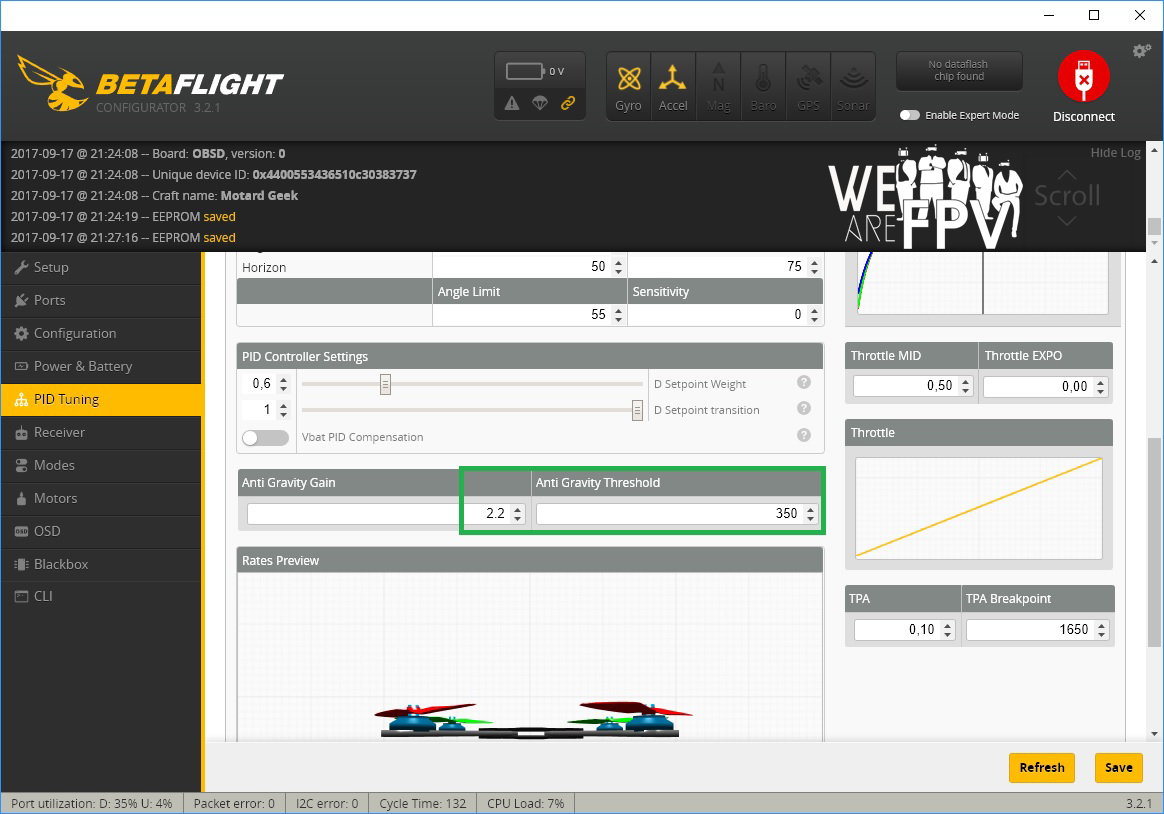
L’Anti Gravity s’active de façon permanente dans les fonctionnalités de BetaFlight :
Ensuite, il y a 2 paramètres à définir dans l’onglet PID Tuning. Le premier c’est le gain. Sa valeur définit par combien sera multiplié le I lorsque la fonctionnalité s’activera. En effet, par défaut l’Anti Gravity ne se déclenche que lorsque les gaz sont augmentés de 350% (de la résolution de 1000-2000us) en moins de 100ms.
Je pars et je reste généralement sur une valeur de gain à 2.2 tout en laissant le déclencheur par défaut :
Attention, on parle de multiplication du gain I, ça peut aller très vite… N’en n’abusez pas où ça vous conduira à coup sûr au death roll !
Faut-il remonter le D ?
Avec des P élevés on peut observer un rebond en fin de rotation (flip, tonneau, etc.). J’essaie au maximum de compenser cet effet de sur-correction en ralentissant le retour au neutre de mon stick Pitch/Roll. Malheureusement, avec mon petit niveau et mes doigts qui tremblent, ça ne suffit pas toujours… Du coup, je rehausse un peu les D si les rebonds sont trop prononcés et trop fréquents :
Attention, tout comme les P et I, il ne faut pas trop monter les D. Cela fait chauffer les moteurs et génère du bruit électronique (des parasites), sans compter l’annulation de l’effet du P.
Faut-il réajuster le TPA ?
Je suis habitué au TPA sous Kiss qui permet de définir 2 breakpoints et surtout de voir en live ce qu’il se trame sur les valeurs des PID grâce à un graphique dynamique qui bouge en fonction du gaz appliqué. C’est très instructif…
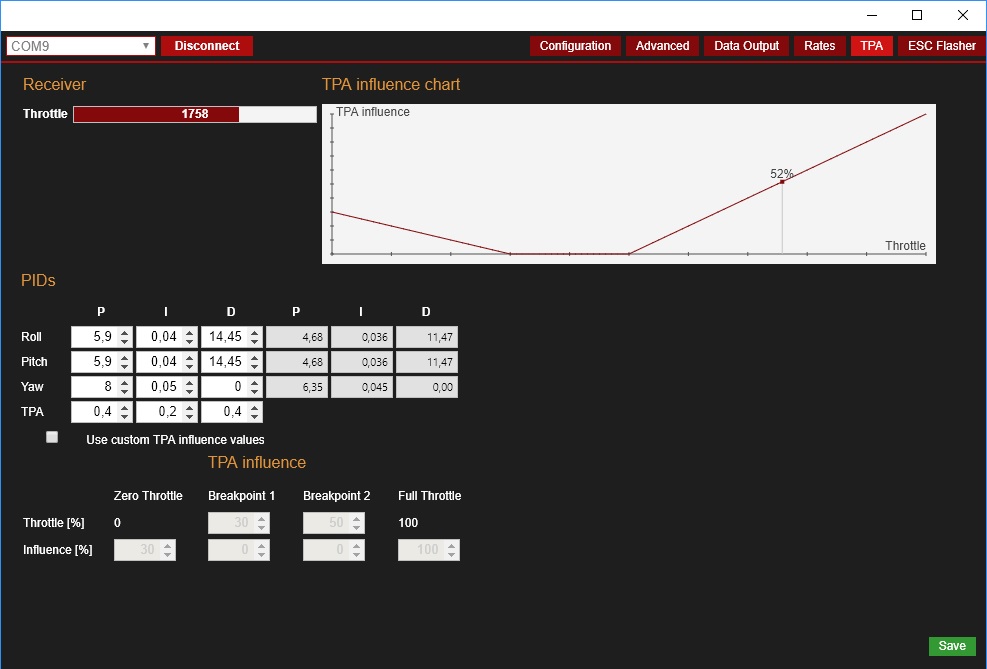
Sous BF c’est plus limité mais j’essaie toujours de jouer du TPA quand j’arrive à des PID limites. Si je vois que les vibrations arrivent vraiment en fin de course des gaz je monte la valeur du TPA et/ou je repousse un peu le Breakpoint.
C’est très au feeling et je suis persuadé qu’avec une blackbox ça serait plus efficace. Un jour je m’y collerai…
Conclusion
Après tout ça vous devriez avoir un quad vraiment différent et plus agréable à piloter. Ce fut en tout cas le cas pour tous les quads que j’ai pu régler. Attention tout de même à ne pas pousser les valeurs dans l’extrême. L’effet inverse pourrait se produire…
En plus, aujourd’hui entre les OSD actifs et les scripts LUA le tuning est devenu tellement plus pratique. Il n’y a plus à sortir son laptop ou son smartphone équipé d’un câble OTG. On peut tout faire sans même avoir à débrancher la LiPo voire même sans avoir à se poser !
Pourquoi donc s’en passer ?
En tout cas, comme d’habitude, n’hésitez pas à nous laisser votre avis sur ce petit guide, que ce soit dans les commentaires ci-dessous, sur les réseaux sociaux ou sur le forum.
La dernière chose à faire pour voler comme un pro c’est de régler ses rates et son expo. David vous a déjà exposé le concept dans cette vidéo. De mon côté j’essaie de voir si j’arrive à retranscrire quelque chose différemment. Attendez-vous donc à avoir un guide sur les Rates, RC Rates et l’Expo / Curve d’ici peu.