
Je me suis remis à BetaFlight sur un 5′ il y a peu, en installant l’OMNIBUS F4 Pro Corner sur mon Chameleon. Je suis loin d’être un « top » pilote comme on dit mais j’aime avoir un quad sain et verrouillé (et précis). La question étant assez récurrente sur le forum et les réseaux sociaux, je vais donc vous expliquer comment je procède. D’autant plus qu’il s’agit d’une release majeure de BF en version 3.2 qui apporte son lot de nouveautés.
Avant toute chose, je tiens à préciser qu’il s’agit de « ma » méthode. Tout n’est peut-être pas juste, n’hésitez pas à me le faire savoir si c’est le cas d’ailleurs. Je me suis principalement basé sur la documentation dont j’ai confronté les informations à tout ce que j’ai pu lire et entendre sur Internet à ce vaste sujet. Les tests en vol m’ont évidemment aidé à affiner tous les réglages.
Les prérequis
Avant de s’attaquer aux réglages des filtres et PID, il faut s’assurer d’avoir un quad sain. Il faut donc une bonne frame et un bon montage pour obtenir un ensemble qui ne vibre pas et n’entre pas en résonance.
A cela on peut (doit ?) ajouter du softmount. Je n’ai jamais trop aimé le faire sur la FC (je préfère le faire à la source, c’est à dire les moteurs) mais je dois avouer que les entretoises type Realacc fonctionnent très bien. Pour les moteurs j’utilise des impressions 3D en TPU trouvées sur Thingiverse.
EDIT : on me souffle sur French FPV250 racer que les gummies RaceFlight font elles aussi un très bon boulot d’amortissement.
Je crois qu’il est également important d’essayer de comprendre ce qu’on fait. C’est quand on commence à bidouiller tout et dans tous les sens que les ennuis arrivent souvent !
Diminuer l’action les filtres
Grossièrement, plus on filtre moins le contrôleur de vol a d’informations sur le comportement réel du multirotor. Il s’en ressent généralement un quad peu précis, peu « locké », qui aura tendance à glisser, dériver durant ses manœuvres…
Avant de commencer à jouer avec les filtres, je vous conseille de lire ces recommandations sur le wiki de BetaFlight.
D Term Lowpass Filter
La première chose à faire est de passer le filtre passe-bas du D de BIQUAD à PT1 :
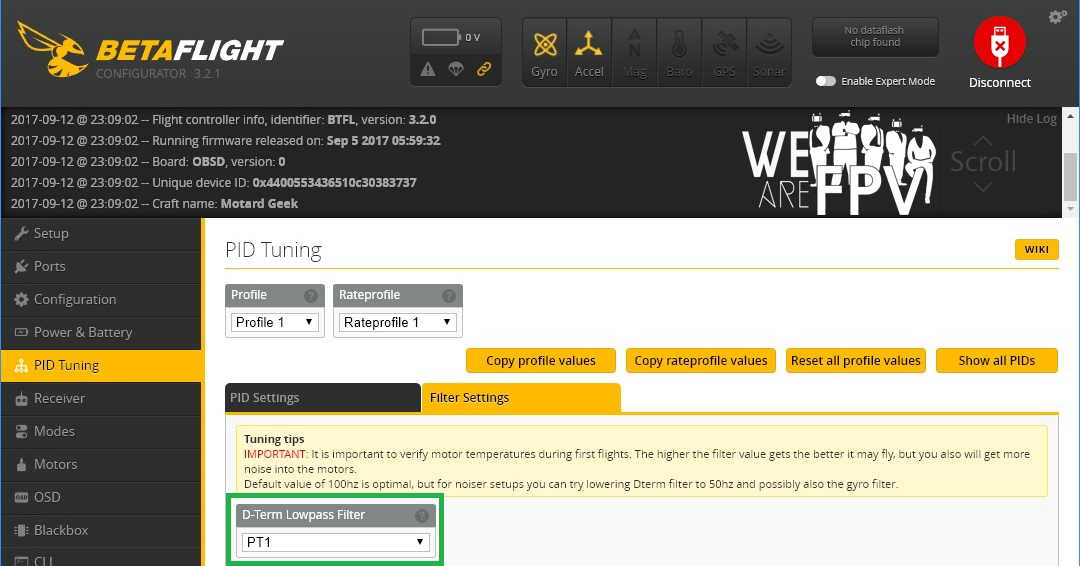
Quelle est la différence en BIQUAD et PT1 ? La réponse est dans la doc :
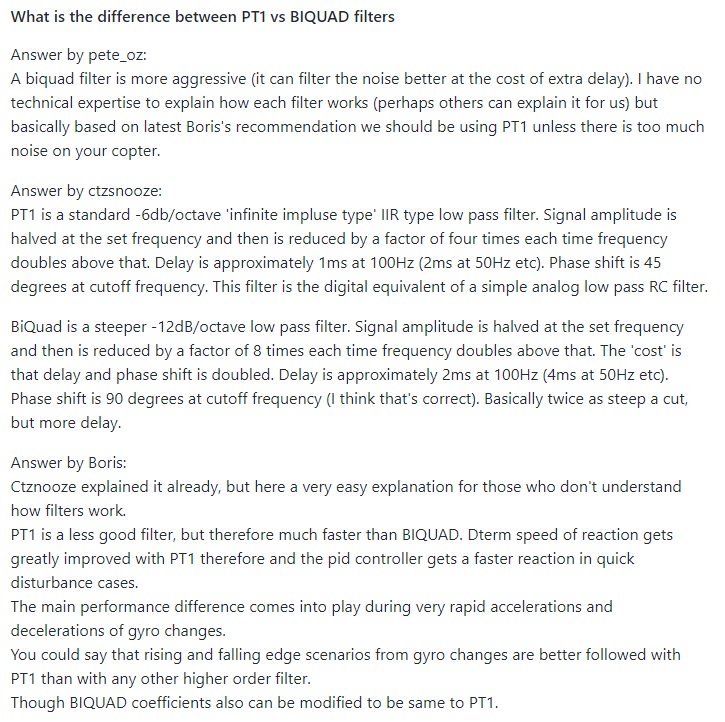
En résumé, le filtre PT1 laisse passer plus de bruit (si bruit il y a) mais agit plus rapidement. Il est donc parfaitement adapté à un quad sain.
Si avec cette modification le drone décolle (un test en stationnaire d’une petite minute suffit) sans souci et que les moteurs ne chauffent pas de façon anormale (l’idéal c’est de vérifier leur température en vol avant de changer le filtre histoire de comparer) on peut passer à la suite.


Les filtres Notch
Contrairement au filtre passe-bas qui concerne toutes les fréquences supérieures à une valeur donnée, le Notch vise une bande précise de fréquences d’oscillations générées principalement par le couple moteurs et hélices.
BetaFlight 3.2 permet d’activer un filtre Notch dynamique. J’imagine qu’il prend le dessus sur les filtres statiques mais dans le doute (je n’ai pas trouvé de réponse), je suis l’ancienne procédure qui consiste à désactiver les filtres Notch un par un.
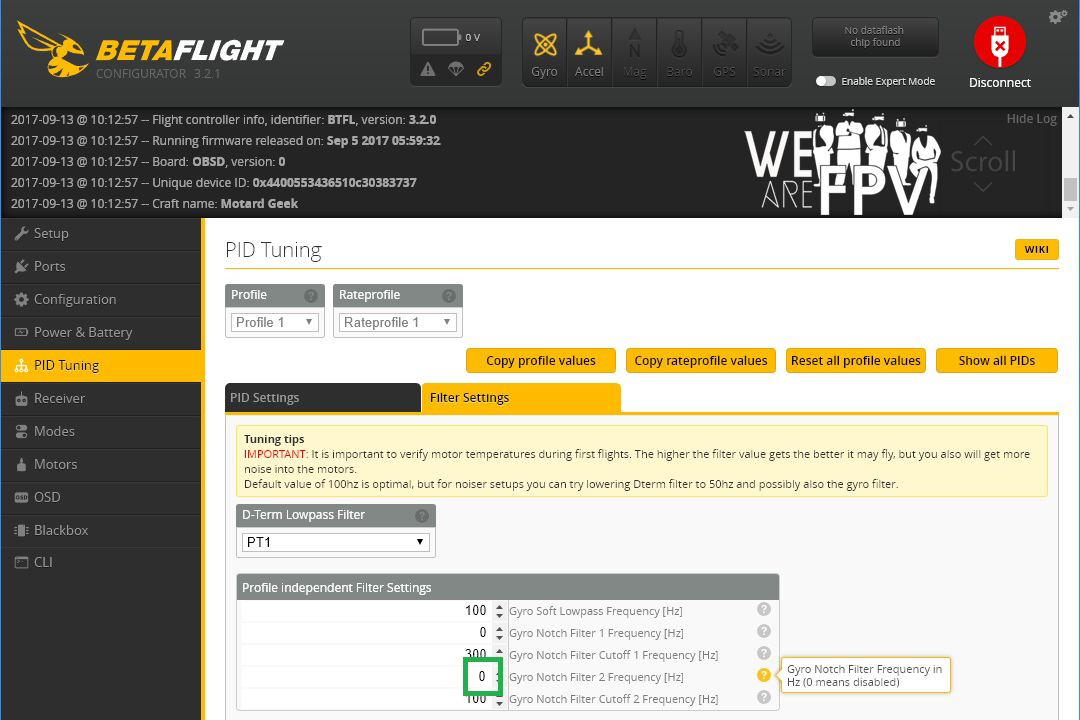
Gyro Notch Filter 1
On désactive donc le premier filtre Notch du gyro :
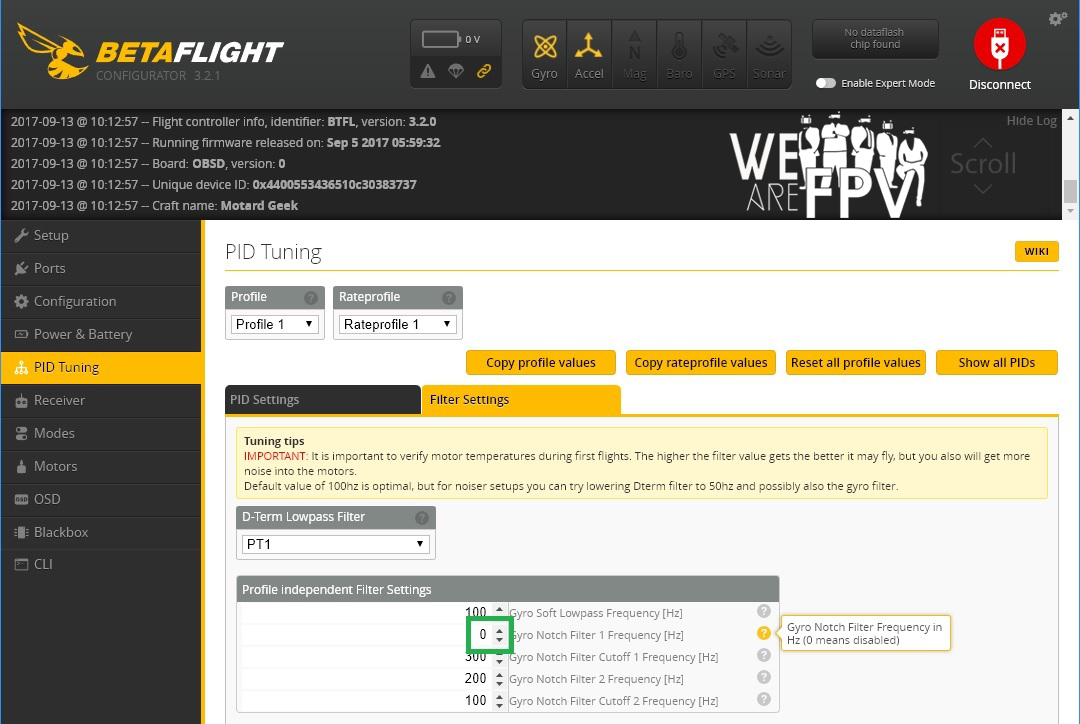
Quand la fréquence est à 0 le filtre est désactivé (le Cutoff n’est plus pris en compte). Une fois que c’est fait, il faut effectuer le même test en vol stationnaire que précédemment. Si le multi n’a pas un comportement bizarre et que les moteurs ne chauffent pas plus, on peut désactiver le second Notch du gyro :
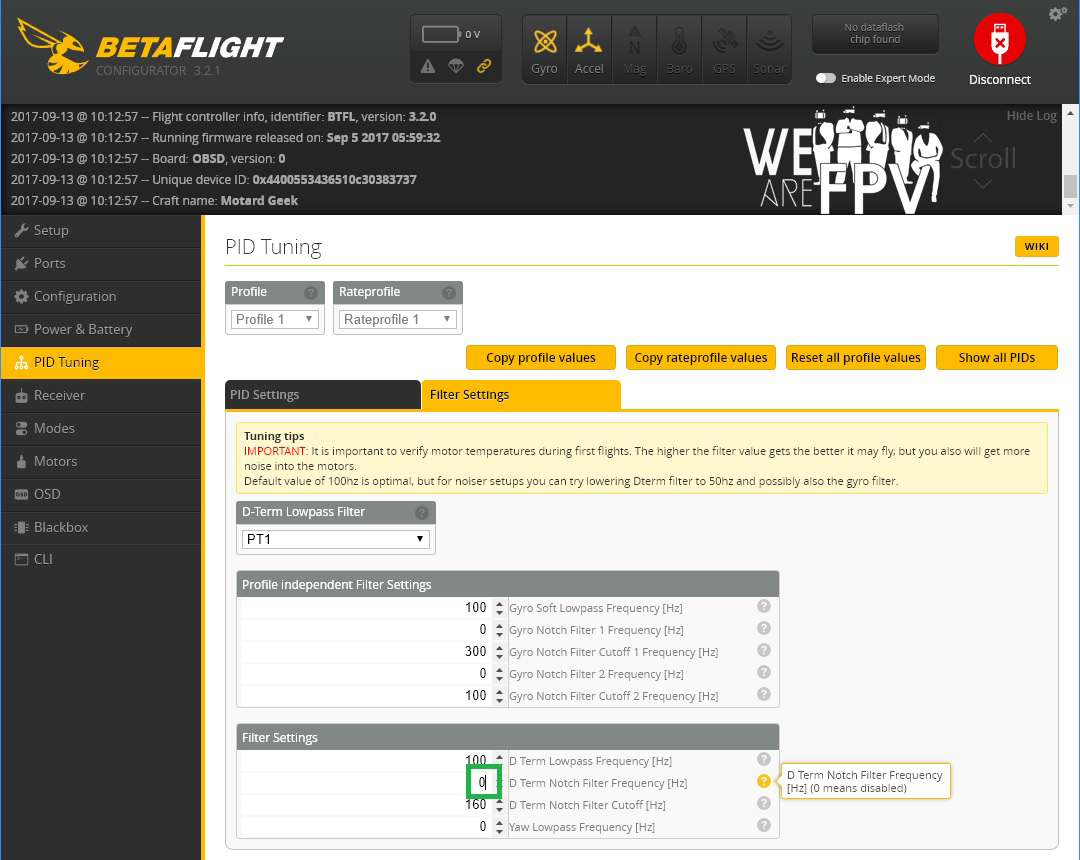
Gyro Notch Filter 2
Encore une fois, si tout va bien en vol stationnaire, on peut désactiver le dernier Notch, celui du D :
D Term Notch Filter
Si tout va bien, le quad est déjà beaucoup plus précis et les propwash (turbulences créées par les rotors) quasi inexistantes !
Le cas échéant je ne sais que vous dire à part réactiver les Notch qui posent problème. Ça ne m’est jamais arrivé. J’imagine que dans ce cas de figure il faille recourir à la BlackBox pour trouver les fréquences les plus adaptées à exclure du traitement du gyro.
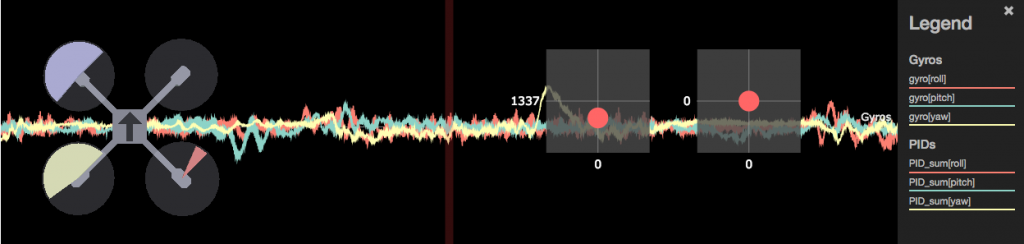
Dynamic gyro Notch filter
La dernière étape de ce chapitre consiste à activer le filtre Notch dynamique et à tester en vol :
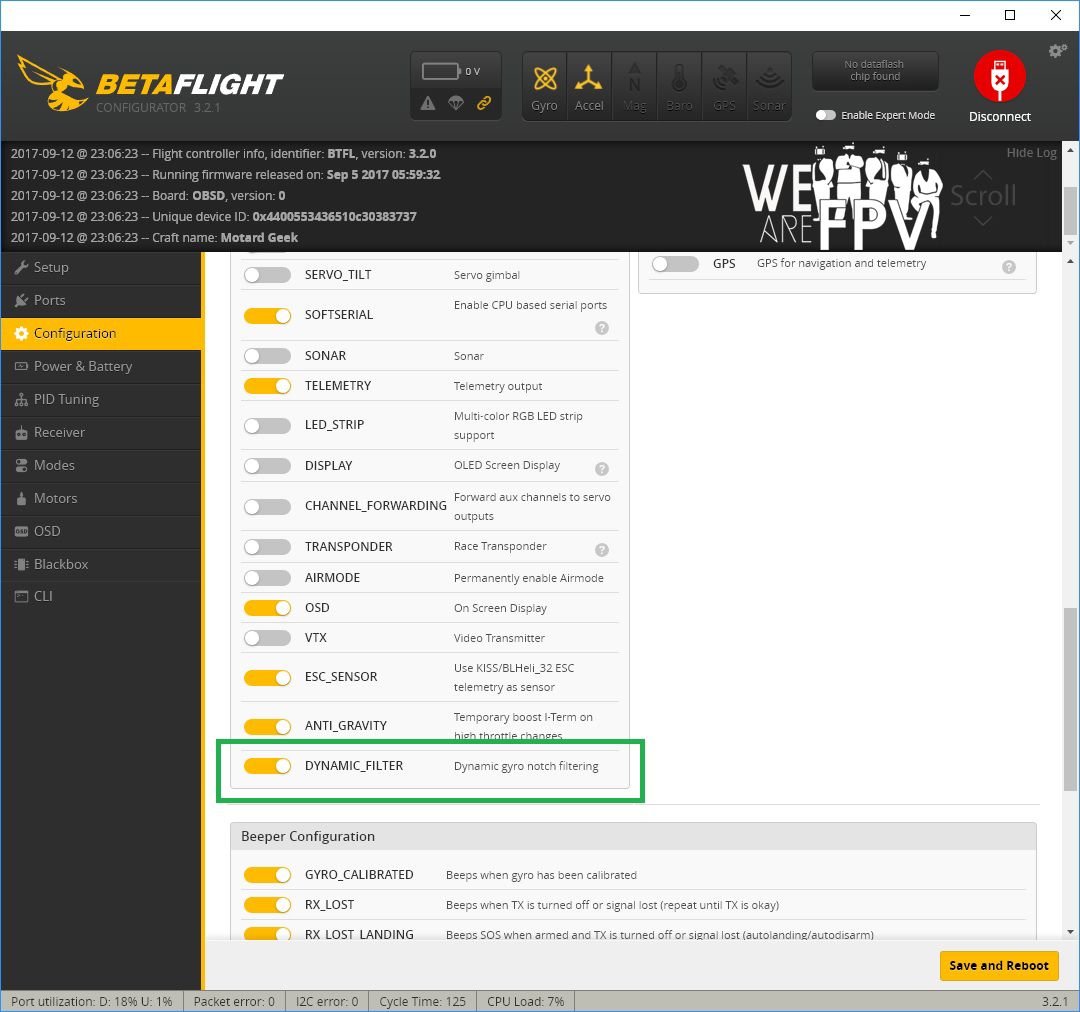
Avec tout ça votre quad devrait avoir un comportement beaucoup plus agréable. En effet, par défaut BetaFlight est configuré pour voler « out of the box » avec un large panel de configurations, incluant probablement les quads les plus pourris… Si vous vous appliquez dans vos montages vous pouvez obtenir de bien meilleures performance de BF qu’avec ses réglages par défaut.
Pour la petite anecdote j’ai appliqué ces préconisations à mon AcroBee et le changement est flagrant ! Les Tiny Whoop sont en effet peu « bruyants » et peu coupleux, il n’y a nul besoin de filtrer et on peut même pousser les P et I bien plus haut qu’en 5′ !
En parlant de PID, sachez que pour avoir un quad qui colle vraiment aux sticks comme on dit, faut passer par une petite séance de tuning. J’aborderai ce sujet dans un prochain article.
En attendant, si vous voulez causer BetaFlight 3.2, n’hésitez pas à passer sur le topic unique qui y est dédié sur le forum.