T-Hobby, anciennement T-Motor, nous propose quelques nouveautés, la principale étant des moteurs dédiés à la pratique du vol en bando, avec les Pacer V4 Bando. On s’intéressera également à la nouvelle stack Velox F7 SE 8S 70A, l’occasion de reparler un peu de AM32.
La vidéo du test
Contexte
J’adore le bando, mais à part l’été, quand je passe chez les Bandolovers, j’en fais malheureusement très peu. Pour être transparent, je n’ai donc pas fait de crash test et je ne suis pas forcément le plus compétent pour juger de la durabilité des moteurs dans ces cas extrêmes.

Par contre on va les démonter, on va vérifier les informations de la fiche produit, on identifiera les spécificités de ces moteurs comparé à d’autres moteurs et bien sûr, on les testera en vol !
Pour des retours plus pratiques sur un usage bando, n’hésitez pas à jeter un coup d’œil du côté des spécialistes du domaine.
Gammes et prix
On se penche donc sur 2 produits, des moteurs Pacer et une stack Velox. Si vous n’êtes pas familier des lignes de produits chez T-Hobby, sachez que :
- La série “F”, est plutôt ciblée Race et hautes performances avec (F40, F50, F60, ESCs F55 Pro…).
- La “P” pour “Pacer”, plutôt liée au Freestyle.
- La série “V” pour “Velox”, plutôt orientée entrée de gamme.
Ils ont également une série “C” pour “ciné” et “M” pour “Micro”.
Bien que la stack soit estampillée Velox, ses caractéristiques sont assez éloignées de l’entrée de gamme, tout comme son prix qui frôle les 130€. On ne connait pas encore le prix officiel des Pacer V4 Bando, mais on doute qu’il soit très différent de celui des Pacer V4 2406 (soit une trentaine d’euros).
Donc on est vraiment sur des prix plutôt premium pour le dire poliment, et je vous invite à garder en tête notre précédente vidéo sur la chaîne. Avant de casser la tirelire, passez la voir si ce n’est pas déjà fait.
Moteurs Pacer V4 Bando 22.6-7 1980 KV
Les Pacer V4 Bando sont comme leur nom l’indique, pensés pour une utilisation bando. Ca ne veut pas dire qu’ils ne feront pas le boulot pour du freestyle ou du ciné, mais tout simplement qu’une attention particulière a été portée à leur durabilité. Là où d’autres moteurs seraient plus optimisés pour de la performance pure avec un poids plus contenu.

Spécifications
Ces moteurs sont des 22.6-7 et annoncent une vitesse de rotation maximale de 1980 KV. A noter qu’ils seront aussi disponibles en 1880 KV.
Au moment où nous écrivons ces lignes, la fiche produit officielle n’est pas connue, on vous partage donc la fiche « brouillon » qui nous a été communiquée.
| Caractéristique | 1880 KV | 1980 KV |
| KV | 1880 | 1980 |
| Courant sans charge (10V) | 1.1 A | 1.2 A |
| Puissance maximale en continu | 173 W | 193 W |
| Résistance de phase | 55 mOhm | 50 mOhm |
| Tension recommandée | 6S | 6S |
| Courant maximum | 39 A | 43 A |
| Poussée maximale | 1646 g | 1739 g |
| Poids | 36 g | 36.5 |
| Aimants | N52H incurvés | N52H incurvés |
| Configuration du stator | 12N14P | 12N14P |
| Diamètre externe axe | 5 mm | 5 mm |
| Trous de montage | diam 16 mm (M3) | diam 16 mm (M3) |
Esthétique
Ils conservent le look de la gamme Pacer, en particulier concernant le motif sur le haut de la cloche. Leur couleur « bleu nuit » métallisé, avec un rendu mat est très classe. De plus, ils arborent un dégradé sur l’ensemble de la cloche allant d’un bleu foncé à un bleu beaucoup plus clair.


Spécificités
Le point qui nous intéresse le plus concernant ces moteurs : la durabilité. Lors du démontage des Pacer V4 Bando, on a effectivement constaté plusieurs optimisations allant en ce sens :
- Ils sont plus lourds que les F40 Pro V et Velox V3 2207 auxquels on les a comparé.
- La cloche est aussi significativement plus lourde.
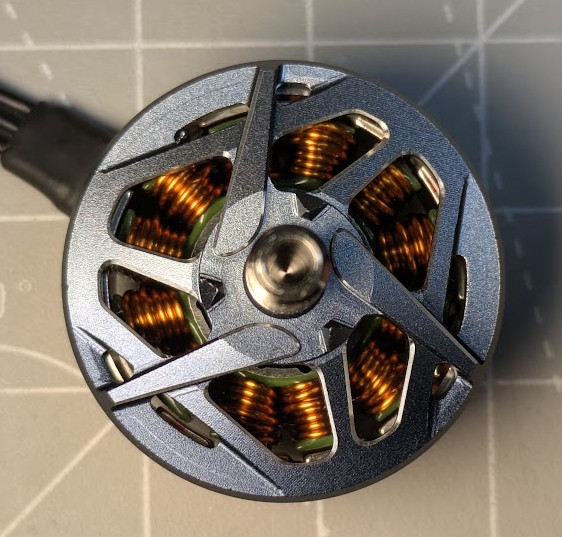
- Le shaft est plus épais sur la partie inférieure, ses parois sont également plus épaisses et contrairement au reste de la gamme, l’axe n’est pas complètement creux.
- Un cerclage à la base de la cloche vient protéger les aimants et renforcer la structure de la cloche.
- Il s’agit d’une cloche « unibell », donc d’un seul tenant, comme c’est le cas sur le reste de la gamme Pacer.
- La gaine des fils moteurs n’est pas en silicone mais en PTFE. Les fils seront donc nettement plus durables et rigides. Par contre, lors du build, il est beaucoup plus pénible de les dénuder.
Quelques précisions supplémentaires :
- La largeur du stator est bien de 22.6 mm. Sa hauteur est de 7.4 mm, et non 7.0 mm comme le nom pourrait le laisser penser, ce qui augmente légèrement le couple du moteur.
- Nous avons mesuré les KV des moteurs sur notre modèle à 1980 KV et nous sommes arrivés à 2067 KV. Bien que cet écart reste dans la marge des 5%, ce n’est pas anodin. Mais on préfère avoir quelques KV en trop que l’inverse.
Avis
Je n’ai pas été dépaysé en vol comparé à mes autres moteurs de chez T-Hobby en 1950 KV, la courbe des gaz est très semblable. Le contrôle dans le bas des gaz est très confortable, ils ont une bonne patate sans être trop explosif dans le haut des gaz.
L’appellation « bando » n’est pas simplement un label marketing, on voit qu’ils ont réellement travaillé sur la durabilité de ces moteurs, en particulier autour de l’axe central.
Maintenant, pour un usage bando, est-ce qu’il vaut mieux miser sur un moteur plus solide à près de 30€ ou plutôt sur 2 Velox qui reviendront au même prix ? Je ne broie pas assez de matos en bando pour me permettre de vous faire une recommandation à cet égard, mais je vous laisse y réfléchir.
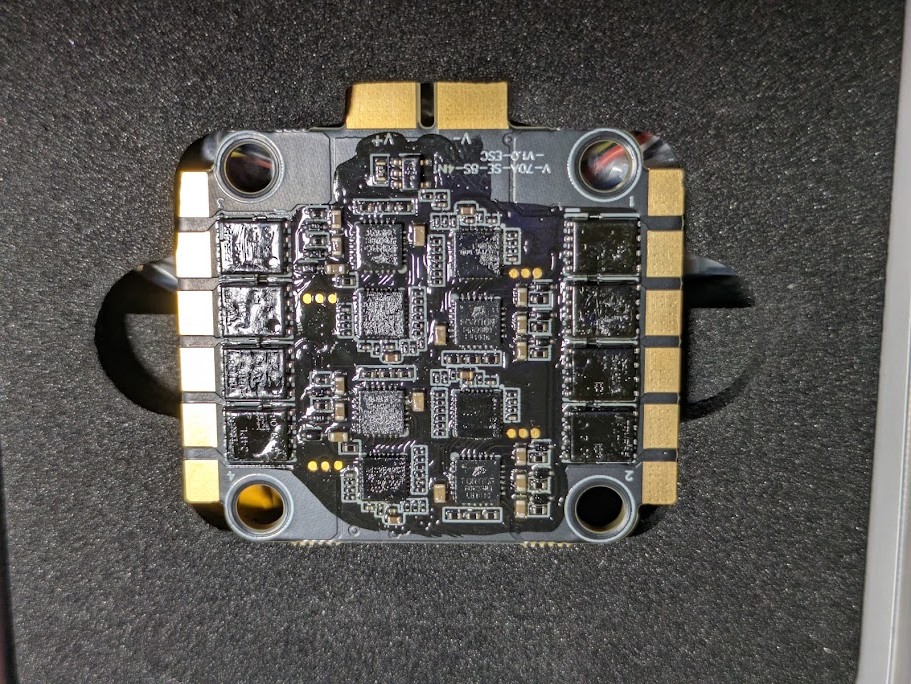
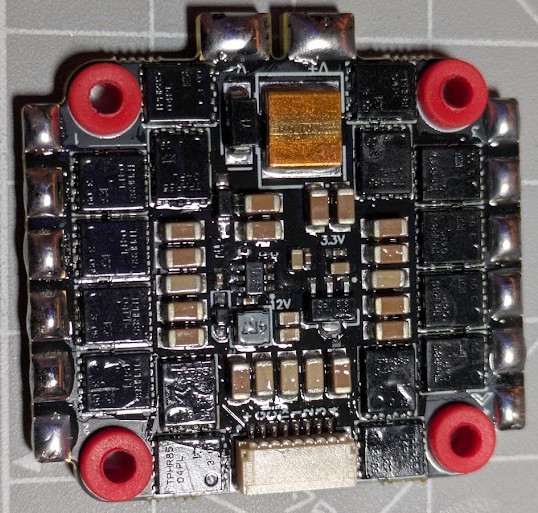
Stack Velox F7 SE 8S 70A AM32
Acheter la Stack Velox F7 SE 8S 70A AM32 chez DFRSpécification générales
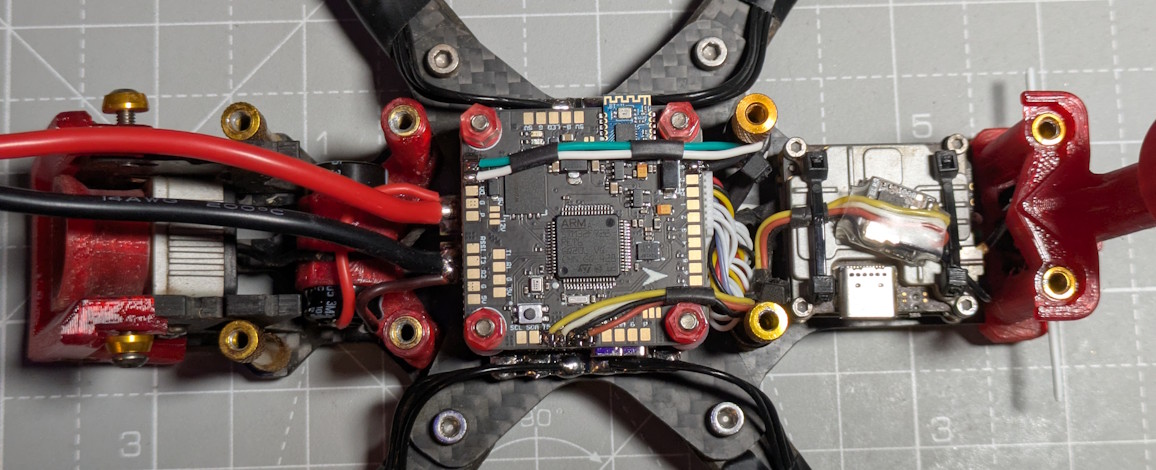
On a beau être sur une stack estampillée Velox, elle n’a rien d’un produit d’entrée de gamme :
- Compatible 8S
- MCU F7
- 8 sorties moteurs
- Baromètre
- Blackbox de 128 Mo
- Bluetooth pour configurer Betaflight en sans fil depuis l’appli SpeedyBee
- ESCs 32-bits capables de débiter 70A en continu !
- Le gryo est évidemment un ICM 42688p
Sur le papier, il n’y a rien à redire !

Evidemment, à près de 130€, cette stack est chère. C’est clairement une stack overkill pour un 5”, elle irait très bien pour une machine de 7” ou plus, d’ailleurs sur la fiche produit officielle, ils mentionnent des moteurs 3120 pour du 10.5” !
Et c’est surtout ce dimensionnement qui justifie son prix.
Remarques spécifiques
Au delà des spécifications qu’on vient de lister, je voudrais ajouter quelques précisions :
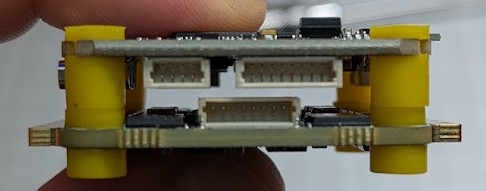
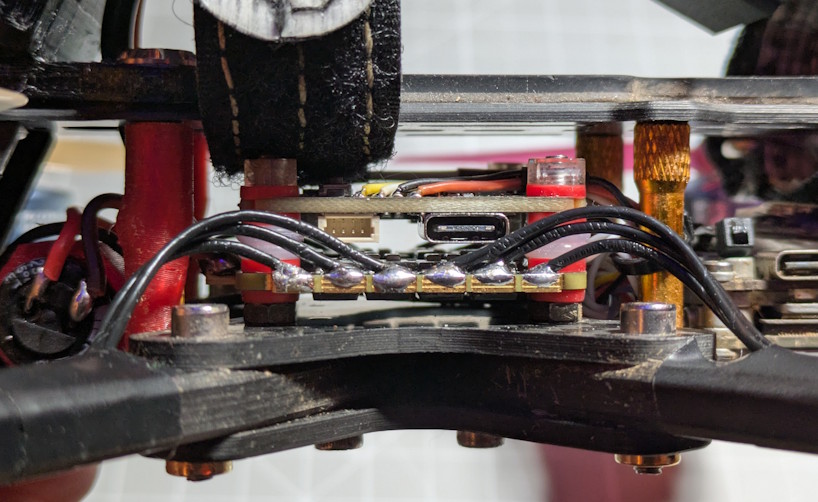
- C’est une stack plutôt fine, pas trop haute.
- Ils annoncent une alimentation propre du gyro (nouvelle génération d’alim ?!). On ne peut pas le vérifier, mais force est de constater que le signal gyro (blackbox) est exceptionnellement propre.
- La disposition des pads UARTs n’est pas parfaite, j’aurais préféré éviter d’avoir à faire traverser des fils au dessus de la stack.
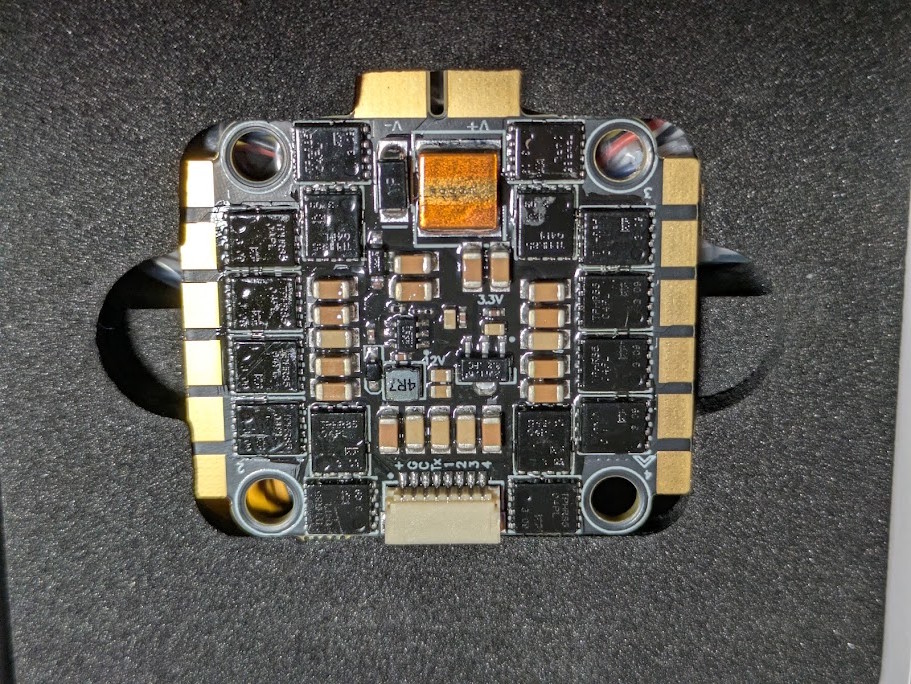
- Pas de pads de soudure sur les ESCs ! C’est un carton jaune. Même s’il y a toujours moyen de retirer le connecteur si ce dernier se casse, ça reste vraiment pas pratique. Certains préfèrent aussi souder directement les ESCs à la FC.
- Nappe standard Betaflight pour les ESCs, il serait apprécié que l’ensemble des constructeur s’en inspire.
- Pads 5V alimentés via USB.
- A priori le Bluetooth est sur l’UART6 mais ça ne fonctionne pas chez moi. L’APP Speedybee voit la FC, mais erreur à la connexion. C’est à priori lié à ma version Betaflight (2015.12 RC2). Il semblerait que ça soit un problème connu depuis la version 4.5.
- Elle est livrée avec un condensateur pour du 6S de 1000µF 35V, en 10 mm de diamètre et un autre pour le 8S en 1000µF 50V, cette fois en 12.7 mm de diamètre.

ESCs Velox 70A AM32
Ce qui nous amène aux ESCs, que j’ai gardés pour la fin parce que le sujet est complexe et qu’il dépasse le périmètre de cette review, en m’obligeant à aborder certaines particularités de AM32. Mais je vais quand même essayer d’aller à l’essentiel sans être trop long.
Contexte
Si vous suivez un peu la chaîne, vous le savez, j’ai commencé très tôt à tester les ESCs en firmware AM32. J’ai eu d’excellents résultats avec certains ESCs, comme ceux de chez Sequre et d’autres résultats plus mitigés avec d’autres ESCs.
Et c’est la raison pour laquelle, je continue à ne pas recommander ces ESCs de manière générale. Je n’ai rien contre AM32, au contraire, j’ai hâte qu’on ait une firmware Open Source pour les ESCs 32-bits aussi fiable que le sont Bluejay et BLHeli32. Et justement, avec cette stack, c’était l’occasion de retester AM32 pour voir où en est le firmware.
Pour en revenir à ces Velox 70A AM32, ça vole plutôt bien pour du freestyle et pour cette raison, ils pourraient convenir à pas mal de monde.
Les petits défauts
Mais, tout n’est pas parfait pour autant et lorsque je teste en profondeur le comportement de la machine, je vois quand même quelques petits soucis. Encore une fois, j’insiste, en cas d’usage réel, ce n’est pas flagrant, c’est limite invisible. Mais comme je suis un peu psycho rigide sur le sujet, j’attends un comportement irréprochable.
En gros, ce que j’ai constaté, c’est un rebond très rapide sur le roll et un peu de propwash résiduel. Et il n’y a rien à y faire côté tuning Betaflight en jouant sur les PID et les filtres.
C’est un problème qui vient des ESCs, et plus précisément de leur firmware. Je précise que j’ai flashé directement les ESCs avec la dernière version de AM32.
Je pars du principe que des nouveaux ESCs doivent tourner avec un firmware récent. Si on les achète et qu’on ne peut pas faire de mises à jour, ce n’est simplement pas acceptable.

Firmware AM32
Et c’est là que je vais devoir faire une petite digression concernant AM32. Il faut s’avoir qu’il s’agit d’un firmware très axé sur la performance brute, et c’est certainement pour cette raison qu’il intéresse pas mal de pilotes de race.

Contexte et rappel
Là ou Bluejay et BLheli32 sont des firmwares qui intègrent des mécanismes de lissage et permettent d’avoir très facilement un bon comportement, AM32 est beaucoup plus brut, beaucoup plus agressif, il fait réagir les moteurs plus nerveusement.
C’est pourquoi il est assez fréquent de constater des “rebonds mécaniques” qu’on ne peut pas tuner via Betaflight. Et en général, c’est sur l’axe du roll qu’ils se manifestent en premier, parce que sur nos drones freestyle, c’est l’axe qui a le moins d’inertie. Et c’est d’autant plus vrai que nos moteurs de 5”’ en 2207 ont déjà un gros couple et qu’ils montent très vite en RPM.
Dans d’autres firmwares, ce sont des choses qui sont déjà lissées par défaut et sur lesquelles on peut jouer avec le Demag Compensation par exemple.
Pour mon souci de propwash résiduel, c’est la même chose. Pour faire disparaître le propwash, la vitesse des moteurs varie ultra rapidement, mais AM32 est tellement brutal qu’il occasionne aussi de micro dépassements parce qu’il applique ces variations de couples de façon très brutale, sans les “arrondir”, donc sans adoucir ces transitions. Et c’est ça qui peut laisser quelques “marques” de propwash.
Alors j’ai tout de même réussi à limiter ces comportements en jouant sur le Ramp Rate et le Motor Timing, mais ce n’est toujours pas parfait.
Le problème de la documentation et la configuration
Et c’est mon autre reproche concernant AM32, non seulement le firmware n’a pas un comportement consistant en fonction des ESCs, des targets et des versions, mais surtout la documentation est pratiquement inexistante.
Tous les sujets sont abordés dans des conversations Discord, des remontées de bug sur Github, des fils de discussion à gauche et à droite, bref, on n’a pas de guide de tuning solide auquel se référer. Si on a de la chance avec la target qu’on utilise, tout marche bien, sinon ça vire vite au cauchemar.
A côté de ça, si je prends les ESCs Bluejay à 28€ que j’ai testé dans la dernière vidéo sur la chaîne… en à peine quelques minutes, j’obtiens un comportement irréprochable, fluide, avec des arrêts nets, sans rebond et une bonne gestion du propwash.
Voilà pourquoi je continue encore aujourd’hui à conseiller des ESCs BLHeliS flashés sous Bluejay : c’est moins cher, c’est facile à régler et le comportement reste consistant entres les versions et les différents hardware. C’est aussi valable pour BLHeli32 si ça ne vous gêne pas que le firmware soit abandonné, par contre c’est quand même plus cher.
On va à suivre de près AM32, peut-être qu’on finira par sortir un tuto qui rendra plus accessible sa configuration, mais pour l’instant, c’est encore trop compliqué pour sortir une méthodologie fiable et répétable sur différents ESCs ou différentes versions de firmware.
Désolé pour cette grosse digression, même si les Velox 70A marchent quand même plutôt pas mal, il fallait que j’explique pourquoi ce n’était pas complètement parfait non plus.
Conclusion sur ce matos T-Hobby

Pour résumer, les moteurs Pacer V4 Bando sont agréables à piloter, T-Hobby a clairement fait des optimisations destinées à renforcer leur durabilité, je laisse les experts du bando leur faire la misère et nous donner un retour plus concret.
S’ils sont vraiment proposés autour de 30€, vous connaissez mon avis là dessus, ce sont des prix que j’ai du mal à entendre, même si dans ce cas particulier, ils ont quand même un argument pour essayer de justifier ce positionnement.
Du côté de la stack, la FC est top, je suis habitué aux blackbox propres mais là on est encore un petit cran au dessus. Les ESCs, d’un point de vue matériel, sont de qualité mais je regrette l’absence de pads à souder et je ne suis pas encore 100% convaincu par AM32.
En l’état si je compare la config d’entrée de gamme de la dernière vidéo à base de moteurs Velox et d’une stack à 60 euros, et le matos de cette vidéo qui coûte plus du double, la config low cost vole parfaitement bien celle-ci vole juste bien. Je suis convaincu que la différence ne tient qu’aux ESCs et plus spécifiquement, à leur firmware.
De notre côté, on va continuer à s’intéresser de près à AM32 et essayer de faire dans les semaines ou mois à venir un tuto qui permettra à la commu de mieux s’y retrouver avec ce firmware.