
En survolant la documentation de l’Eachine Trashcan afin de préparer le test, j’ai découvert une nouvelle fonctionnalité de BetaFlight 4 (version de code majeure aujourd’hui planifiée au 1er avril 2019…).
Malgré le retard par rapport à la date annoncée fin 2018 (qui était début janvier 2019), certains contrôleurs de vol sont déjà vendus en BetaFlight 4.0 (la dernière version stable étant la 3.5.4 au moment où j’écris ces lignes). C’est notamment le cas de la CrazybeeF4 PRO qui équipe le drone poubelle du constructeur chinois ou de la Foxeer F722 Dual Gyro.
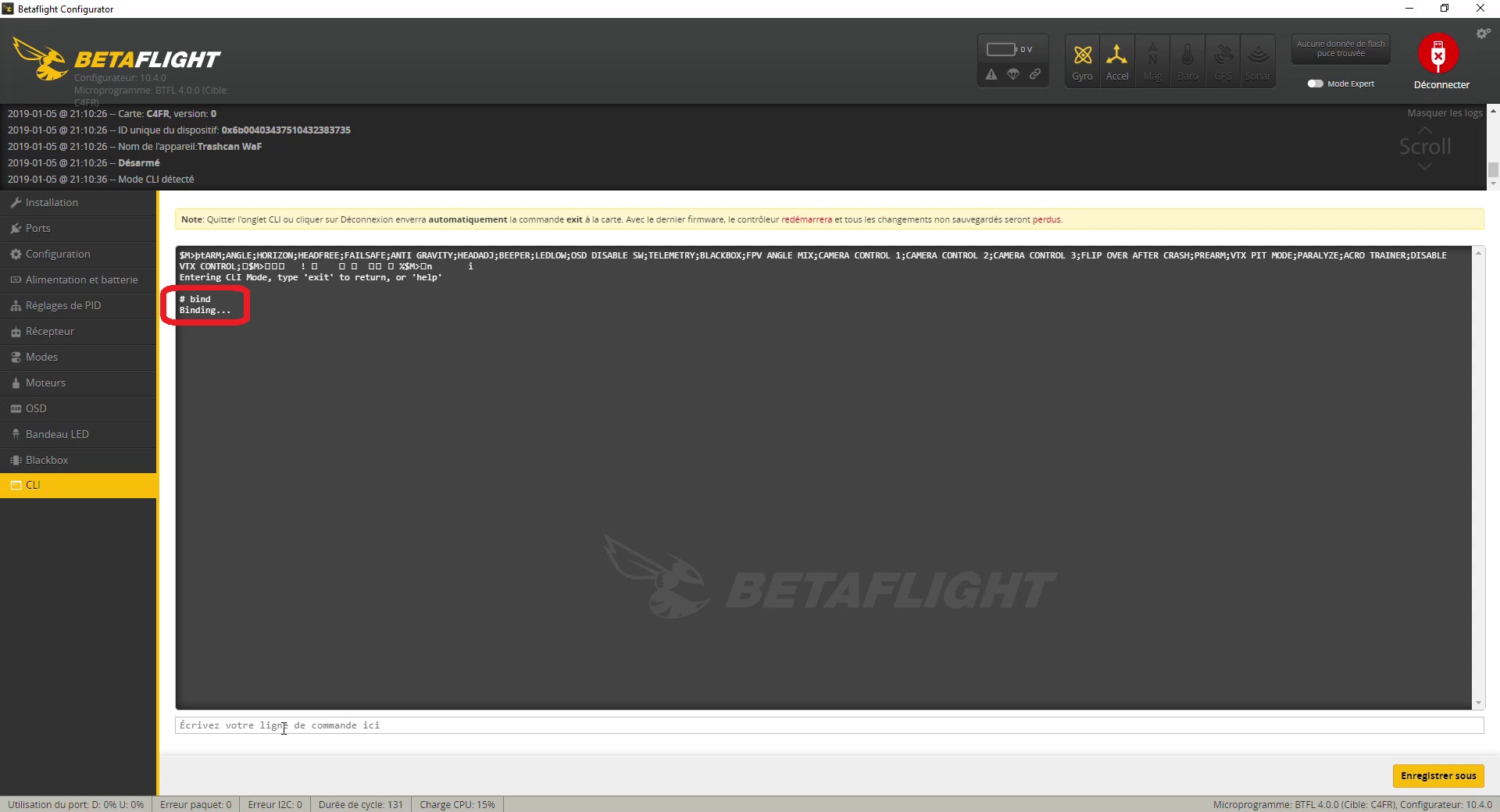
Sur la CrazybeeF4 une nouvelle commande a fait son apparition. Il s’agit de la commande « bind« . Elle permet de passer le récepteur intégré à la carte contrôleur de vol en mode appairage. Cela rend la procédure de bind plus simple que d’aller chercher une bouton microscopique planqué au milieu de l’électronique qui risque d’être endommagée. Ça peut aussi dépanner quand le bouton de bind est cassé.
Malheureusement, cette commande ne fonctionne pas sur la F722. Il y a de fortes chances que ce soit réservé aux FC avec Rx intégré. Cependant, je n’ai trouvé aucune information à ce sujet sur le Wiki de BetaFlight. Il y a donc peut-être une chance qu’à terme ça se démocratise même pour les Rx externe (en passant par le S.Port ou le F.Port).
EDIT du 20/01/2018 : la documentation officielle du FrSky SPI RX.
BetaFlight 4, les autres nouveautés
L’équipe de BF met en avant 3 caractéristiques principales pour leur nouvelle release majeure. En premier lieu, les performances de vol sont améliorées avec, notamment, un filtre passe-bas (lowpass) qui prend en compte le niveau de gaz. Il y a également le filtre notch dynamique qui est rendu plus simple et plus efficace à la fois. En second lieu arrive le « Launch control« . Ce mode principalement destiné à la race permet de faciliter le décollage en inclinant automatiquement le drone. Pour finir, il sera désormais possible d’avoir différents profils de mise en page de l’OSD, au même titre que les rates et les PID. A noter au passage que l’OSD se dote des informations de debug moteur (comme la vitesse de rotation moyenne et maximum). Du coup en combinant ces 2 dernières nouveautés ça permet d’afficher de façon temporaire les informations de diagnostique.
Bonjour,
je suis complètement nouveau en ce qui concerne les drones (FPV, tout ça..). J’ai reçu le trash can de Eachine et le jumper T16 comme émetteur. j’ai téléchargé « Beta flight » et je n’arrive absolument pas à connecter le drone avec ma radio. Pour info, j’utilise un MacBook Pro. Est-ce-que je pourrais avoir de l’aide?
Merci d’avance,